Diese Seite als PDF-Dokument? Einfach auf das Symbol klicken und etwas warten... ---> |
 |
|

|
Step by Step |

Inhaltsverzeichnis
- Step 1 - Software herunterladen
- Step 2 - MikroKopter mit Windows-PC verbinden
- Step 3 - KopterTool öffnen und Software installieren
- Step 4 - Fernbedienung vorbereiten und Empfänger anschließen
- Empfänger anschließen
- Step 3 - Verbindung MikroKopter-Computer
- Step 4 - Empfänger binden und einstellen
- Step 5 - MikroKopter einstellen
- Step 6 - ACC kalibrieren
- Step 7 - Höhensensor kalibrieren
- Kontrolle der Kalibrierung / manuelles Einstellen
- Step 8 - Kompass kalibrieren
- Step 9 - MikroKopter "aktivieren"
- Step 10 - Funktionen + Fliegen
Include: Textmarkierung "##include_step_begin" nicht gefunden!
Include: Textmarkierung "##include_step_end" nicht gefunden!
Diese Seite als PDF-Dokument? Einfach auf das Symbol klicken und etwas warten... ---> |
|
|
Step by Step |
Mit nur wenigen Schritten, können Sie Ihren MikroKopter flugbereit haben.
In der folgenden "Step by Step" Anleitung beschreiben wir die einzelnen Schritte vom Anschließen des MikroKopter
an den Windows-PC, über das Einspielen der Software bis hin zum ersten Flug.Sollten dennoch Fragen offen sein oder etwas nicht funktionieren hilft unser Support gerne weiter: support@hisystems.de
|

Step 1 - Software herunterladen
Im ersten Schritt benötigt man die aktuelle Software für seinen MikroKopter sowie das aktuelle MikroKopter-Tool.
Die aktuelle Software incl. hierzu passendem MikroKopter-Tool kann hier heruntergeladen werden: Download
Step 2 - MikroKopter mit Windows-PC verbinden
Um die aktuelle Software in den Kopter einspielen zu können, muss dieser mit einem Windows-PC verbunden werden.
Dies geschieht über das MKUSB.Der Anschluss des MKUSB und die Treiberinstallation ist hier beschrieben: MKUSB
Step 3 - KopterTool öffnen und Software installieren
Ist die Verbindung hergestellt, kann das MikroKopter-Tool geöffnet und gestartet werden um die aktuelle Software einzuspielen.
Das Updaten der Software ist hier beschrieben: SW-Update
Step 4 - Fernbedienung vorbereiten und Empfänger anschließen
Mit der im "Step by Step 1" heruntergeladenen zip-Datei, kann die Graupner HoTT Fernbedienung nun vorbereitet werden.
Im ersten Schritt wird die zip-Datei entpackt und der Inhalt der Ordner in die gleichnamigen Ordner auf der microSD-Karte der Fernsteuerung kopiert. Danach die microSD-Karte wieder in die Fernsteuerung einlegen.
- Ist die microSD Karte wieder in der Fernsteuerung, können der Modellspeicher und das MK-Sprachfile importiert werden:
Modellspeicher importieren
Im zweiten Schritt importieren wir den fertigen Modellspeicher den wir gerade auf die microSD-Karte kopiert haben.
Die Schritte hierfür sind:- Sender einschalten
Falls die Abfrage "Bitte wählen - HF EIN/AUS?" kommt -> "AUS" wählen
Bei der rechten "Vier-Wege-Taste" den mittleren Button SET drücken um in das Menü zu gelangen
Runter auf den Menüpunkt Kop./Löschen und mit SET öffnen
Import von SD auswählen und mit SET bestätigen
Den Modellspeicher "MK-Easy" mit SET auswählen
Bei "Import nach Modell" den ersten Speicherplatz 01 mit SET bestätigen
Die Frage "Import?" mit JA und einem weiteren SET bestätigen
- Sender einschalten


MK-Sprachfile importieren
Damit auch die zum MikroKopter passenden Ansagen über die Fernbedienung ausgegeben werden, muss das MK-Sprachfile installiert werden.
Dies macht man über den "Versteckten Modus" wie folgt:Bei der linken "Vier-Wege-Taste" (ESC) die Richtung UP und DOWN gleichzeitig drücken und halten
Dann bei der rechten "Vier-Wege-Taste" (SET) in der Mitte SET drücken
Im "Versteckten Modus" den Menüpunkt ANSAGEN mit SET öffnen
Das passende MK-Sprachfile (DE/EN) auswählen und mit SET bestätigen


Jetzt kann der Empfänger mit der FlightCtrl des MikroKopter verbunden werden.
Angeschlossen wird das PPM-Summensignal-Servokabel und der graue Servostecker für die Telemetrieübertragung.
Empfänger anschließen

(Anschluss an FlighCtrl V3.0)Der Graupner HoTT Empfänger wird an die zwei Anschlusskabel der FlightCtrl angeschlossen.
Dabei ist das 3-adrige PPM-Kabel für die Kanalübergabe und Versorgung des Empfängers
zuständig und das graue Kabel für die Telemetrieübertragung.Das HoTT-System bietet verschiedene Empfänger an, die am MikroKopter genutzt werden können.
Nachfolgend wird der Anschluss der Empfänger GR-16 und GR-24 beschrieben.
Diese Empfänger können über das einzustellende PPM-Summensignal bis zu 16 Kanäle ausgeben.
Empfänger GR-16

Der GR-16 HoTT hat 8 Servo-Anschlüsse. Über den Servoanschluss Nr.8 kann das Summensignal abgegriffen werden. Hierüber können bis zu 16 Kanäle (Senderabhängig) abgegriffen werden.
Die Reichweite beträgt mit diesem Empfänger lt. Hersteller 4000mtr.- Anschlüsse
Servoausgang 8 => PPM Summensignal (siehe PPM-Summensignal einstellen)
Telemetrieschnittstelle "T" => Anschluss Telemetriesignal FlightCtrl
Empfänger GR-24

Der GR-24 HoTT hat 12 Servo-Anschlüsse. Über den Servoanschluss Nr.8 kann das Summensignal abgegriffen werden. Hierüber können bis zu 16 Kanäle (Senderabhängig) abgegriffen werden.
Die Reichweite beträgt mit diesem Empfänger lt. Hersteller 4000mtr.- Anschlüsse
Servoausgang 8 => PPM Summensignal (siehe PPM-Summensignal einstellen)
Telemetrieschnittstelle "T" => Anschluss Telemetriesignal FlightCtrl
- Anschlüsse



(Anschlussbeispiel Graupner HoTT)


INFO
- Benötigt wird ein Empfänger mit PPM-Summensignal (wie z.B. GR-16/GR-24 mit "SUMO16" oder Jeti RMK2)
- Die Telemetrie des MikroKopters kann nur an einer Graupner HoTT oder Jeti-Fernbedienung angezeigt werden.
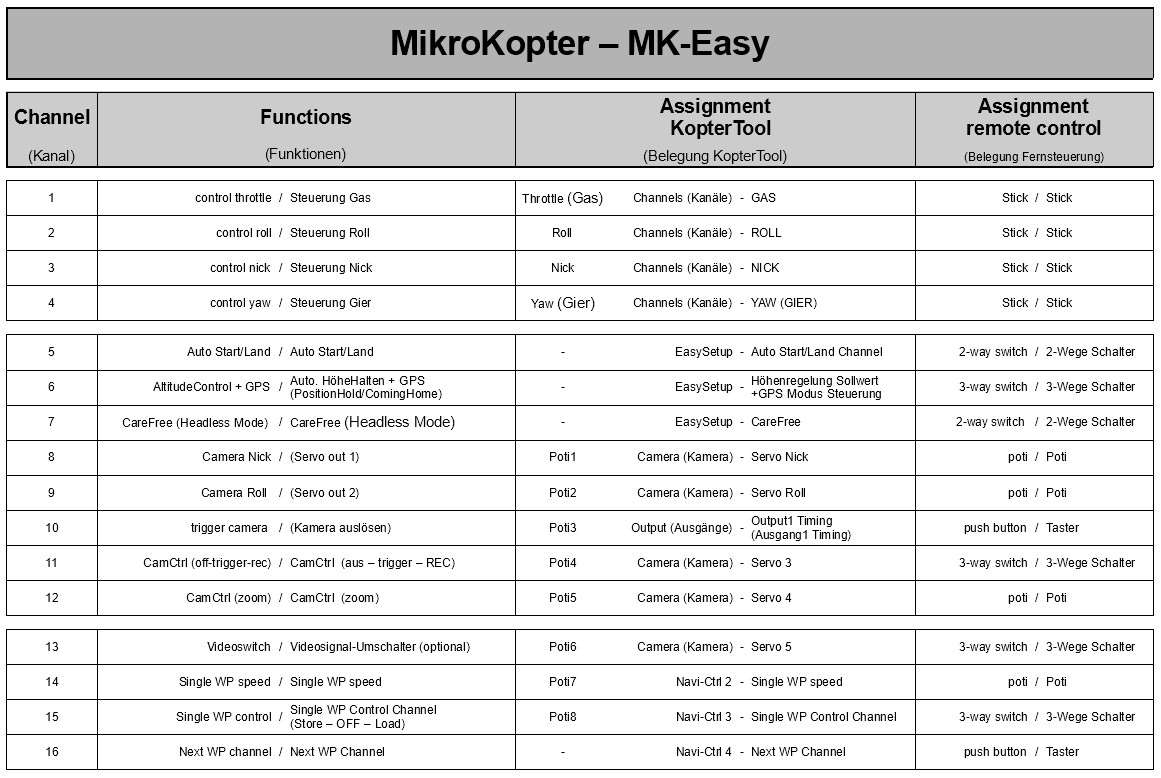
Hat man eine andere Fernbedienung, oder möchte selber einen Modellspeicher anlegen, kann man hier die Kanalbelegung unseres "MK-Easy" Setting einsehen: Link
Step 3 - Verbindung MikroKopter-Computer
Um die Verbindung zwischen MikroKopter und (Windows)Computer herzustellen, wird ein MK-USB benötigt.
Alternativ kann auch eine drahtlose Verbindung (z.B. mit einem RangeExtender) genutzt werden. Für ein Softwareupdate sollte IMMER eine eine drahtgebundene Lösung per MK-USB genutzt werden.
Für ein Softwareupdate sollte IMMER eine eine drahtgebundene Lösung per MK-USB genutzt werden.
Das Einrichten des MK-USB (oder eines RangeExtenders) ist einfach erledigt:
1. |
Das USB-Kabel in den Computer und das MK-USB (oder den RangeExtender) einstecken. Per Molex-Kabel ist das MK-USB dabei bereits mit der FlightCtrl verbunden. |
|

Falls dies nicht geschieht, kann man den Treiber hier herunterladen und manuell installieren: |
Aktueller "FTDI"-Treiber passend für: |
|

2. |
Nun kann man das MikroKopter-Tool starten. Hier gibt man dann den COM-Port ein, der für das MK-USB von Windows vergeben wurde. |
|

3. |
Der MikroKopter kann nun mit dem Akku (LiPo) verbunden werden. |
|

Step 4 - Empfänger binden und einstellen
Empfänger binden
Der Empfänger wird nun an den neuen Modellspeicher MK-Easy gebunden.
Dazu muss der Empfänger bereits am Kopter richtig angeschlossen sein und der Kopter ist mit einem Lipo versorgt.
(Siehe auch: Empfänger anschließen)
Die Reihenfolge ist wie folgt:Bei der rechten "Vier-Wege-Taste" den mittleren Button SET drücken um in das Menü zu gelangen
Runter auf den Menüpunkt Grundeinst. Mod. und mit SET öffnen
In der Zeile "Modul HoTT" das linke n/v auswählen
- Am Empfänger nun die "SET" Taste so lange drücken (ca. 3-4 Sekunden), bis die rote LED anfängt rot/grün zu blinken.
Dann an der Fernsteuerung die Taste SET drücken
Es erscheint Binden .... im Display
Nach erfolgreicher Bindung sieht man geb. an der Stelle wo vorher n/v stand

INFO:
Der Kopter kann während des gesamten Vorganges piepen. Dies verstummt erst nach kompletter Einstellung des Empfängers.

Empfänger FS deaktivieren
In den Grundeinstellungen nutzt der Empfänger ein eigenes "fail safe" welches wir deaktivieren müssen.
(Hiermit würde der Kopter bei einem Empfangsausfall die letzen empfangenen Kanalwerte der Fernsteuerung erhalten (z.B. Vollgas und Nick vorwärts))
Damit der Kopter bei einem Empfangsausfall immer zum Startpunkt zurückfliegt, müssen wir das MikroKopter FailSafe nutzen.
Dazu muss das vom Empfänger deaktiviert werden.
Das Ausschalten geht wie folgt:Bei der rechten "Vier-Wege-Taste" den mittleren Button SET drücken um in das Menü zu gelangen
Runter auf den Menüpunkt Telemetrie und mit SET öffnen
In der Telemetrieanzeige EINSTELLUNGEN, ANZEIGEN wählen und mit SET öffnen
Nach rechts zum Menü RX FAIL SAFE wechseln
Hier den Eintrag MODE von "HOLD" auf OFF stellen ...


Empfänger auf PPM-Summensignal umstellen
Das von der FlightCtrl benötigte Summensignal wird nun ebenfalls am Empfänger eingestellt.
Solange dies nicht eingestellt ist, erhält man vom Kopter eine Fehlermeldung ("err7: RC Signal lost") und der Kopter
gibt eine akustische Warnmeldung aus.
Sofort nach Aktivieren des Summensignal am Empfänger verstummt das Piepen und die Kanäle sind am Kopter verfügbar.
Das Einstellen geht wie folgt:Bei der rechten "Vier-Wege-Taste" den mittleren Button SET drücken um in das Menü zu gelangen
Runter auf den Menüpunkt Telemetrie und mit SET öffnen
In der Telemetrieanzeige EINSTELLUNGEN, ANZEIGEN wählen und mit SET öffnen
Nach rechts zum Menü RX SERVO TEST wechseln
Hier den Eintrag CH OUT TYPE von "ONCE" wechseln auf SUMO 16


- Nun sollte der Kopter nicht mehr piepen und kann im nächsten Step eingestellt werden
Jetzt kann im MikroKopter-Tool die Funktion der einzelnen Kanäle überprüft werden.
Der MikroKopter ist dazu noch mit dem Computer verbunden und das MikroKopter-Tool geöffnet (siehe "Step by Step 3")
In der Hauptansicht über den Button Einstellungen die Koptereinstellungen öffnen
Links den Reiter Kanäle auswählen
Als "Empfänger" mus "Graupner HoTT" eingestellt sein (evtl. auswählen und mit "Schreiben" speichern)
- Damit die Fernsteuerung die Telemetrieereignisse spricht, wird ein Hagen gesetzt bei "Telemetrie: Alle Ereignisse sprechen"
- Wird nun ein Geber an der Fernsteuerung betätigt, kann man den Ausschlag des dazu eingestellten Kanal/Balken beobachtet.

Step 5 - MikroKopter einstellen
Das fertige Setting ist auf den Modellspeicher der Fernsteuerung abgestimmt. So kann der MikroKopter direkt in Betrieb genommen werden. Die einzelnen Schritte sind:
Das fertige "MK-Easy" Setting wurde herunterladen (siehe "Step by Step 1")
Der MikroKopter ist noch mit dem Computer verbunden und das MikroKopter-Tool geöffnet (siehe "Step by Step 3")
In der Hauptansicht über den Button Einstellungen die Koptereinstellungen öffnen
Über den Button Laden das Setting MK-Easy auswählen und Öffnen
- Die Settings werden nun automatisch übernommen und angezeigt
Falls noch nicht geschehen -> Im MixerSETUP den richtigen Koptertype auswählen (Quadro/Hexa/Okto)
Das Setting mit den Button Schreiben in den Kopter speichern
(Das ganze in alle 5 Parameterplätze (Speicherplätze) des Kopters speichern)Das MikroKopter-Tool kann nun geschlossen werden

Der Kopter kann nun vom Computer getrennt werden.
Nach diesen Einstellungen ist der MikroKopter fast Flugbereit. Es fehlt nur noch die Kalibrierung des Systems im nächsten Step.
Step 6 - ACC kalibrieren
Der ACC Sensor ist ein Drei-Achsen-Sensor. Über diesen Sensor wird die aktuelle Neigung des MikroKopter gemessen und die automatische Höhenregelung unterstützt.
Sind die Sticks für Nick und Roll zentriert, hält der Kopter dann automatisch die Waage.
Für die Kalibrierung muss der Kopter gerade stehen. Je genauer der ACC Sensor kalibriert wird, desto besser hält der Kopter die Waage und somit die Position.
Ohne diese einmalige Kalibrierung kann der Kopter nicht gestartet werden und es ertönt eine Fehlermeldung.
Eine Neukalibrierung des ACC Sensors ist in der Regel nicht notwendig.
Note
Zusammen mit der ACC Kalibrierung wird ebenfalls die Gyro Kalibrierung im Kopter abgespeichert.
Diese wird für den BoatMode genutzt.
Die Kalibrierung erfolgt in wenigen Schritten:
Step
Beispielansicht
Die Fernsteuerung einschalten und den Kopter mit dem Akku verbinden.

Step 1
Steht der Kopter schief ...
... muss er zuerst gerade ausgerichtet werden.
Am einfachsten ist dies mit einer Wasserwaage oder Dosenlibelle.
Step 2
An der Fernsteuerung werden nun die Sticks
- "Gas" nach oben
und
- "Gier" nach rechts
für länger 5 Sekunden in dieser Position gehalten!

(Beispielansicht Mode2)Step 3
Nachdem vom Kopter eine akustische Bestätigung zu hören ist,
(je nach aktivem Setting: 1-5 Pieptöne)
können die Sticks wieder losgelassen werden.
Damit ist die Kalibrierung abgeschlossen.
Step 7 - Höhensensor kalibrieren
!!! Die folgenden Einstellungen betreffen NUR die FlightCtrl V3.0 - Ältere FlightCtrl Versionen können nicht kalibriert werden !!!
Der barometrische Höhensensor wird für das automatische Halten der Höhe des MikroKopters benötigt.
Damit dieser Sensor auch unter Temperaturschwankungen (Faktor x cm pro °C) ordnungsgemäß Funktioniert, sollte der Sensor einmalig kalibriert werden.Wurde der Höhensensor nicht kalibriert, kann der Kopter beim automatischen Höhehalten in der Höhe schwanken.
Eine Neukalibrierung des Höhensensors ist in der Regel nicht notwendig.
INFO: Vor Auslieferung der FlightCtrl, wurde der Höhensensor bereits einmal kalibriert.
Die Kalibrierung
Zur Kalibrierung des Höhensensors wird eine Wärmequelle benötigt.
Dies kann z.B. eine Lampe oder ein Fön sein.WICHTIG: Die Erwärmung MUSS LANGSAM erfolgen.
Die Kalibrierung erfolgt in wenigen Schritten:
Step
Beispielansicht
Step 1
Die (ausgeschaltete) Wärmequelle wird (nicht zu dicht!!) über
die FlightCtrl V3.0 platzieren.
(Man kann das GPS/GNSS auch demontieren - dann erfolgt das Erwärmen etwas schneller.)
Step 2
Der Kopter kann nun mit dem Computer verbunden werden.
(Per MK-USB oder Funkverbindung)
Das KopterTool starten und den Kopter mit Spannung versorgen.
(Fernsteuerung ebenfalls einschalten)
Step 3
Im KopterTool den Button "NaviCtrl" drücken.
Im virtuellen Fenster nun mit dem roten Pfeil (nach rechts oder links) die Ansicht ändern auf "Barometer".
Step 4
In der Ansicht "Barometer" den roten Pfeil (rauf) unter "(CAL)" betätigen und die Kalibrierung starten.
Step 5
Die Wärmequelle nun einschalten.
In der Anzeige sieht man nun die Info "Warm up slowly" und die Temperaturanzeige erhöht sich langsam.

Sollte die Erwärmung zu schnell stattfinden, erscheint die Warnmeldung "Heater off!"
Die Wärmequelle dann entfernen und warten bis die Meldung erlischt.
Ist die Meldung weg, kann die Wärmequelle mit größerem Abstand neu positioniert werden.
Step 6
Wurde die Erwärmung korrekt durchgeführt, erscheint nach einiger Zeit ein "Okay" und rechts unten "save".
Zur Speicherung der Kalibration nun wieder den roten Pfeil (rauf) unter der Anzeige "save" betätigen.
Die Kalibrierung des Höhensensors ist somit abgeschlossen.

Kontrolle der Kalibrierung / manuelles Einstellen
Der über die Kalibrierung gespeicherte Wert, kann in dem Fenster "Temperature settings" kontrolliert und auch verändert werden.
!! Ein verändern des Wertes kann auch einen negative Effekt auf das automatische Höhehalten haben - hier ist die Kalibrierung wie oben beschrieben, vorzuziehen!!!
Step
Beispielansicht
Über den Pfeil neben dem "Einstellungen" Button kann man das Fenster "Temperature settings" auswählen.

Step 8 - Kompass kalibrieren
Der Kompass wird wie das GPS für die automatisierte Steuerung des MikroKopters benötigt.
Für eine ordnungsgemäße Funktion muss daher ein neu angeschlossener Kompass einmalig kalibriert werden.Wurde der Kompass nicht kalibriert, können Kompass/GPS unterstützte Funktionen nicht genutzt werden und man den Kopter nicht starten.
Eine entsprechende Fehlermeldung (error 31) wird dann über die Telemetrie angezeigt.Eine Neukalibrierung des Kompasses ist in der Regel nicht notwendig.
Nur wenn der Kopter unter der Funktion "PositionHold" an einem weit entfernten Flugort Kreise zieht sollte die Kalibrierung erneut durchgeführt werden.
Die Kalibrierung
Bitte beachten
Der Kopter sollte draußen, fernab von magnetischen Einflüssen kalibriert werden!
Er muss mehrmals um die eigene Achse komplett gedreht werden.
Hierbei gilt: Je genauer der Kompass kalibriert wurde, desto besser fliegt der Kopter hinterher.
Zieht der Kopter z.B. Kreise (bei eingeschalteter GPS-Funktion PositionHold und in einer Höhe über Haus- / Baumniveau) , sollte man den Kompass neu kalibrieren.
Sollte es Probleme beim Kalibrieren geben (z.B. ERR22), kann ein Magnetfehler am Kopter hieran schuld sein.
Informationen hierzu können hier nachgelesen werden: MagnetError
Die Kalibrierung erfolgt in 5 Schritten:
Step
Funktion
Beispielansicht (Mode2)
Die Fernsteuerung einschalten und den Kopter mit dem Akku verbinden.
Step 1
Kompass Kalibrierung einleitenNick nach unten
(und halten)
dann
Gas oben + Gier links
(Der Kopter piept 1x)
Step 2
Kalibrierung startenNick 1x nach unten ziehen
(Der Kopter piept 2x und das Knacken beginnt)
Kalibrieren der X-Achse
(Nick-Achse)Den Kopter mit der Front
(Pfeilrichtung der FlightCtrl)
nach Süden oder Norden ausrichten,
dann
den Kopter ein paar Mal über die Nickachse komplett drehen, bis der Summer nicht mehr "knarrt".
Kopter drehen
Den Kopter um 90° drehen.
Das Knacken beginnt wieder.
Kalibrieren der Y-Achse
(Roll-Achse)Den Kopter ein paar Mal über die Rollachse drehen, bis der Summer nicht mehr "knarrt".

Step 3
Kalibrierung der X und Y-Achse abschließenNick 1x nach unten ziehen
(Der Kopter piept 3x)Step 4
Kalibrierung der Z-Achse startenNick 1x nach unten ziehen
(Der Kopter piept 4x und das Knacken beginnt wieder)Kalibrieren der Z-Achse
(Gier-Achse)INFO: Hierbei ist es egal, ob der Kopter mit der X oder Y-Achse nach Süden (Norden) zeigt.
Den Kopter ein paar Mal über die Roll- oder Nickachse drehen, bis der Summer nicht mehr "knarrt".Step 5
Kalibrierung der Z-Achse beenden.Nick 1x nach unten ziehen
Der Kopter piept zur Bestätigung 2x
Nachdem der Kopter nach der erfolgreichen Kalibrierung 2x "gepiept" hat, ist die Kalibrierung abgeschlossen.
Kontrolle per HoTT Sender
WICHTIG:
Damit die korrekten Werte angezeigt werden, müssen die Gyros erneut kalibriert werden (Gas rauf + Gier links).
Nun kann im unteren Display des Graupner HoTT Senders in der Text-Telemetrie der Magnetwert überprüft werden.
Das Öffnen geht wie folgt:
Bei der rechten "Vier-Wege-Taste" den mittleren Button SET drücken um in das Menü zu gelangen
Runter auf den Menüpunkt Telemetrie und mit SET öffnen
Im "Telemetrie" Menü den Eintrag EINSTELLEN,ANZEIGEN mit SET öffnen
Die Taste RIGHT so oft betätigen bis die Text-Telemetrie angezeigt wird
Um die Anzeige von "0m/s" in "MAG" umzuschalten, ein mal SET drücken.
Hier muss der Magnetwert unter "MAG" nun um 100% liegen und der Wert für die Inclination (incl) um den Wert,
der in Klammern angezeigt wird.
Ist der Magnetwert (oder die Inclination) deutlich abweichend (~10%-15% mehr oder weniger), sollte man die
Kalibrierung neu durchführen!

{kind=link}
Step 9 - MikroKopter "aktivieren"
Sind alle vorherigen "Step by Step" Schritte erfolgreich erledigt, steht der Kopter nun Betriebsbereit vor einem.


(Beispiel Mode2)


- Die Telemetrieanzeige auf der Graupner HoTT Fernsteuerung sollte nun so aussehen:
Um den MikroKopter nun Start- und Funktionsbereit zu schalten, werden diese Sticks wie folgt bewegt:
- Gas -> rauf
- Gier -> links
Die Sticks werden für ca. 2 Sekunden in dieser Position gehalten.
(Der Kopter muss dabei absolut ruhig stehen und soll nicht wackeln)
Der Kopter bestätigt dann diese Eingabe mit 1-5 Pieptönen und in der unteren
Zeile wird das aktive Setting kurz angezeigt.
(Anzahl "Pieptöne" ist abhängig vom aktiven Parametersatz (Set) im Kopter).
- Die Telemetrieanzeige auf der Graupner HoTT Fernsteuerung sollte nun so aussehen:
Jetzt ist der Kopter flugbereit und alle Funktionen sowie die Servoausgänge nutzbar.
(z.B. eine angeschlossene Kamerahalterung kann nun bedient werden)
Info
Diese "Aktivierung" ist nach jedem Akkuwechsel erforderlich!
Ohne Aktivierung kann der Kopter nicht gestartet werden und die Servoausgänge haben keine Funktion.
Step 10 - Funktionen + Fliegen
Info
Tip: Stellen Sie Ihren MikroKopter mitten auf die freie Fläche Positionieren Sie sich hinter Ihrem MikroKopter in einen genügend großem Abstand Die Vorderseite des MikroKopter (Ausleger mit der roten Markierung) schaut dabei von Ihnen weg Fliegen Sie bei Ihren ersten Testflügen an windstillen Tagen und in nicht zu großer Höhe -> Kleine Stickbewegungen => kleine Reaktion -> Große Stickbewegungen => starke Reaktion Achten Sie beim Starten, Landen und während des Übungs-Fliegens darauf, dass die Vorderseite Üben Sie das Fliegen zuerst mit aktivierter Automatik (Schalter „GPS-AC“ in Mittelstellung auf „PH“)
Optimal ist eine Testflughöhe von ~2 - 5 Metern
des MikroKopter immer vom Piloten weg zeigt
Dies hilft den MikroKopter sicher und einfach kennenzulernen

1. Automatik aktivieren
Um leicht und einfach fliegen zu können schalten wir die Automatik an.
Hierbei wird der barometrische Höhenregler und das GPS zum automatischen halten der Position aktiviert.Dies geschieht mit dem 3-fach Schalter "GPS+AC" indem wir diesen in Mittelstellung auf „PH“ (PositionHold) stellen.
INFO:
Piept der MikroKopter nun im Sekundentakt, ist noch kein Satfix vorhanden und es kann nicht gestartet werden.
In diesem Fall einfach warten bis der Satfix automatisch erfolgt und das Piepen verstummt.

2. Motoren starten
Zum Starten der Motoren beide Sticks nach unten zur Mitte bewegen.
Danach die Sticks langsam wieder in Mittelstellung bringen.
Der Kopter bleibt nun mit langsam drehenden Motoren am Boden stehen.


3. Abheben
Für das Abheben bietet der MikroKopter zwei Möglichkeiten:
Autostart
Den Schalter "Auto" in die Stellung START stellen.
(Der Schalter bleibt in dieser Stellung stehen!)
oder
Manueller Start
Den Gas-Stick langsam und wenig nach oben bewegen.
(und in der Stellung halten!)
Der Kopter startet nun langsam, hebt ab und steigt solange der Gas-Stick
nach oben gehalten wird.
Wird der Gas-Stick zentriert, hält der MikroKopter die aktuelle Höhe bei.
4. Fliegen
Ist der MikroKopter in der Luft, kann er über die Sticks wie folgt bedient werden:




Gas-Stick zentriert -> Kopter hält die aktuelle Höhe
Nick/Roll-Stick zentriert -> Kopter hält die aktuelle Position



Gas-Stick rauf -> Kopter steigt
Gas-Stick runter -> Kopter sinkt




Gier-Stick rechts -> Kopter dreht sich nach rechts
Gier-Stick links -> Kopter dreht sich nach links




Nick-Stick rauf -> Kopter fliegt vorwärts
Nick-Stick runter -> Kopter fliegt rückwärts




Roll-Stick links -> Kopter fliegt nach links
Roll-Stick rechts -> Kopter fliegt nach rechts


5. Landen
Möchte man den Kopter landen, fliegt man ihn zuerst zurück zu dem Punkt an dem er gelandet werden soll.
Für das Landen bietet der MikroKopter dann zwei Möglichkeiten:
Autolandung
Den Schalter "Auto" in die Stellung LAND stellen.
(Der Schalter bleibt in dieser Stellung stehen!)
oder
Manuelle Landung
Den Gas-Stick langsam und wenig nach unten bewegen.
(und in der Stellung halten!)
Der Kopter sinkt nun langsam, bis der Boden erreicht ist.
Sobald der Kopter am Boden steht den Gas-Stick komplett ach unten ziehen und in der Position halten.
Nach kurzer Zeit reduziert sich dann auch die Motordrehzahl und die Motoren können ausgestellt werden.

6. Motoren stoppen
!!! Die Drehzah der Motoren muss sich reduziert haben - Andernfalls kann der Kopter nach hinten kippen !!!
Zum Stoppen der Motoren beide Sticks nach unten außen bewegen.
Sind die Motoren aus, die Sticks langsam wieder in Mittelstellung bringen.
Der Akku kann nun vom MikroKopter getrennt und dann die Fernbedienung ausgeschaltet werden.