Diese Seite als PDF-Dokument? Einfach auf das Symbol klicken und etwas warten... ---> |
 |
|

FlightCtrl V3.0 |
.jpg?m=1453719653 "http://gallery3.mikrokopter.de/var/albums/intern/MK-Baugruppen/FlightCtrl/FlightCtrl-V3.0/FC_V3_(350).jpg?m=1453719653")
Inhaltsverzeichnis
Info / Download
Die neue FlightCtrl V3.0 vereint jetzt Flugsteuerung und 32-bit Navigation Technologie auf einer Platine.
Alle zu nutzenden Funktionen sind hier beschrieben: Funktionen
(optionales Zubehör wird benötigt)
Ausgeliefert wird die FlightCtrl V3.0 mit:
- Anschlusskabel für einen PPM Summensignal Empfänger
- Telemetrie-Anschlusskabel
- Tiny Servo Adapter zum Anschluss von Servos (z.B. Kameragimbal)
- Installierter Software
- komplett funktionstüchtig auf Funktion getestet.
INFO:
Die FlightCtrl V3.0 kann nur mit der MikroKopter Software ab Version V2.14 betrieben werden!
Zusätzlich benötigt wird noch ein GPS sowie ein externer Kompass.
Shoplink : Flight-Ctrl V3.0
Shoplink : GPS incl. ext. Kompass
Aktuelle Software : Download
Technische Daten

- Gewicht: 26g
- Abmessungen: 67mm x 67mm (Lochabstand: 44,6mm x 44,6mm)
- Spannung: bis 7S (30V)
- 32-bit Technologie
- 3 Schaltausgänge
- LEDs zur Statusanzeige an den Schaltausgängen
- bis zu 6 Servoausgänge
- Höhenregler nutzbar bis 5000m Höhe
- CAM Trigger-Eingang für Anschluss an Blitzschuh der Fotokamera
- Redundante Nutzung der Motoransteuerung
Redundante Flugsteuerung (mit zweiter FlightCtrl V3.0)
- Anschluss unterschiedlichster Empfängersysteme
- Speicherung der LOG Daten auf SD Karte
- ...
Anschlüsse
Molex Vorne
|
MAIN |
CAM |
Servo |
IO2 |

Anschluss Versorgung + Summer
Über den Molexanschluss MAIN wird die FlightCtrl V3.0 mit Spannung (Lipospannung) versorgt.
Gleichzeitig erfolgt hierüber die Ansteuerung der BL-Ctrl und des Summers.

Anschluss
- 5pol Molexkabel
FlightCtrl -> Buchse MAIN
BL-Ctrl Verteiler -> Buchse FlightCtrl.
- Summer
Kontakte Speaker +/- am BL-Ctrl Verteiler
Anschluss CAM

Der Anschluss C / CAM ist ein Schaltausgang, über den z.B. ein Shuttercable für eine Kamera geschaltet werden kann.
An dem Kontakt stehen dabei 5V (max 100mA) und GND zur Verfügung. Geschaltet wird GND.
Der Schaltkontakt ist optional auch an den Pads C und 5V daneben verfügbar.
Diese sind parallel zu den Molexkontakten an CAM geschaltet.
Die Einstellungen für diesen Schaltausgang nimmt man in den Einstellungen des KopterTool unter dem Reiter Ausgänge (Ausgang1) vor.
Anschluss SERVO

An den Anschluss Servo wird die externe Servoplatine TinyPCB (Shoplink) angeschlossen.
Über die Stiftleiste des TinyPCB können dann direkt 2 Servoausgänge (Servo1+2) abgegriffen werden. Daran kann dann z.B. eine Kamerahalterung angeschlossen werden. Versorgt werden die angeschlossenen Servos dann über die FlightCtrl V3.0 mit 5V (max. 1A).

Alternativ kann hier auch die optional erhältliche Servoplatine ServoPCB (Shoplink) angeschlossen werden. Hieran können dann bis zu 6 Servoanschlüsse abgegriffen werden. Zudem wird die Platine direkt an die LiPo-Versorgung mit angeschlossen. So werden die Servos mit 5V / max.2A versorgt.
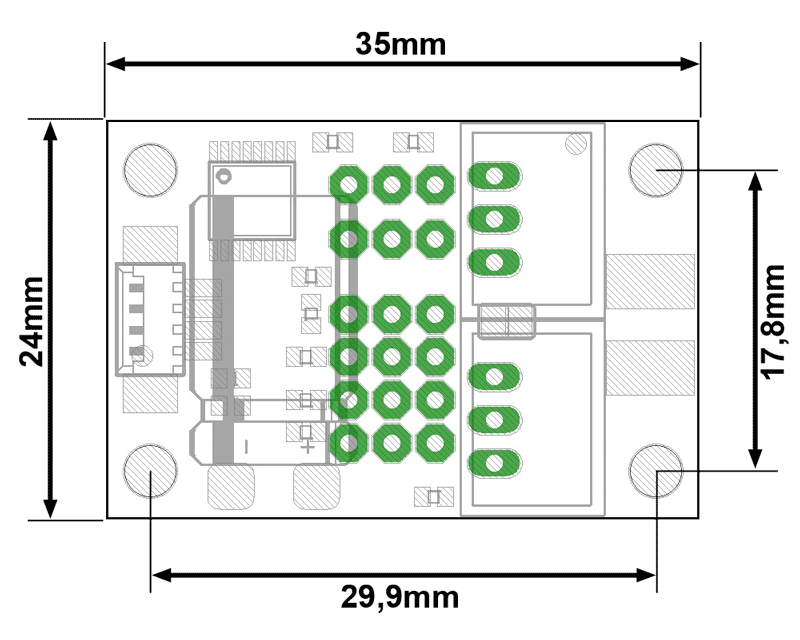
Die Maße des ServoPCB findet man hier: Maße
Anschluss IO2

An den Anschluss IO2 kann die optional erhältliche Blitzschuh-Adapter (Link) angeschlossen werden.
Über den Blitzschuh-Adapter wird die Foto-Auslösung der Fotokamera erkannt.
In einem extra .txt LOG File (auf der SD Karte in der FlightCtrl V3.0) wird dann die Fotoauslösung der Kamera zusammen mit den GPS Koordinaten aufgezeichnet.
Info:
Ist keine Blitzschuh-Adapterangeschlossen, wird der Auslösezeitpunkt (Schaltzeitpunkt) vom Schaltausgang CAM eingetragen.
Info:
Der Blitzschuh-Adapter löst die Kamera NICHT aus !!!
Zur Auslösung der Fotokamera wird ein Shuttercable benötigt.
Molex Rechts
|
IO1 |
Analog |
EXT2 |
UART2 |
I2C |

Anschluss IO1

IO1 kann für einen Fallschirm (Parachute) verwendet werden.
Wird der Kontakt geschlossen, wird sofort jeder Motor abgeschaltet.
Für die Nutzung der Funktion ist eine Lizenz erforderlich.
Anschluss I2C
 ]
]
Über den Anschluss I2C kann z.B. die Steuerung CamCtrl angeschlossen werden.
Mit dieser Steuerung kann dann eine Sony Foto- oder Videokamera ausgelöst, gezoomt oder die Videoaufnahme gestartet werden.
Zusätzlich werden über diesen Anschluss dann Telemetriedaten der Kamerasteuerung mit übertragen (wie z.B. REC aktiv, Modus der Kamera etc.).
Molex Hinten
|
CAN |
CAN |
UART (Update) |
SD CARD |
|

Anschluss CAN

Über den Anschluss CAN wird für den Redundanten Betrieb der Elektronik, die Master-FlightCtrl mit Slave-FlightCtrl verbunden.
INFO: Hierbei wird nur je ein CAN Anschluss benötigt. Der zweite, parallel geschaltete CAN Anschluss ist optional für eventuelle spätere Anwendungen vorgesehen.
Anschluss UART (Update)

Über den Anschluss UART (Update) wird das MK-USB V3 (Shoplink) an die FlightCtrl angeschlossen. Hierüber kann die FlightCtrl V3.0 mit neuer Softwareupdate bespielt, Einstellungen getätigt oder Wegpunktelisten an den Kopter übertragen werden.
INFO:
Die Versorgung der FlightCtrl muss immer über eine externe Spannungsquelle (LiPo) erfolgen.
Der Jumper auf dem MK-USB V3 hat hier keine Funktion.
SD CARD

In die FlightCtrl V3.0 kann eine microSD Karte eingesteckt werden. Diese sollte max. 2GB groß und mit FAT16 formatiert sein.
Hierauf werden sämtliche Flüge incl. der Telemetriedaten, aufgezeichnet. Über das KopterTool kann man diese LOG Files dann herunterladen.
Ausgelesen werden diese LOG Files dann mit den GPXViewer.
Molex Links
|
BL |
BL |
GPS |
Compass |
EXT1 |

Anschluss BL
Wird eine zweite FlightCtrl V3.0 für die redundante Ausführung verwendet, kann der UART Anschluss des BL-Ctrl V3 Verteilers über ein 3-poliges Molexkabel mit dem Ausgang BL der Slave FlightCtrl verbunden werden.
Wird z.B. ein single Okto BL-Ctrl V3 Verteiler verwendet, wird ein BL Ausgang der Slave FlightCtrl verbunden.
Nutzt man hingegen z.B. einen Double Quadro V3 Verteiler, wird der obere und der untere UART Anschluss mit je einem der BL Anschlüsse der Slave FlightCtrl verbunden.
Anschluss GPS

Der Anschluss GPS wird über ein 5-poliges Molexkabel mit dem MK-GPS verbunden.
Anschluss Compass

Anschluss Ext. Kompass

Anschluss Kompass MKGPS
Der Anschluss Compass wird über ein 4-poliges Molexkabel mit einem externen Kompass oder dem Kompass im MK-GPS verbunden.
Anschluss EXT1 / L

Der Anschluss EXT1 ist ein Schaltausgang, über den etwas geschaltet werden kann.
An dem Molexkontakt stehen dabei 5V (max 100mA) und GND zur Verfügung. Geschaltet wird GND.
Zusätzlich ist der Schaltkontakt parallel an den Pads L und 5V daneben verfügbar.
Die Einstellungen für diesen Schaltausgang nimmt man in den Einstellungen des KopterTool unter dem Reiter Ausgänge (Ausgang2) vor.
Wichtig:
LEDs nicht direkt an diesen Schaltkontakt anschließen. Hierbei kann der Schaltausgang beschädigt werden!
Für den Anschluss von LEDs kann man das ExtensionPCB nutzen.
Pads Unterseite

Die Lötpads an der Unterseite der FlightCtrl werden i.d.R nicht genutzt. Nur wenn ein entsprechender Empfänger genutzt wird oder ein direkter Anschluss zwingend nötig ist, kann man hierauf zurückgreifen.
5V/GND/R/T
Anschluss für Empfänger (siehe Empfängeranschlüsse)
Telemetry
aktiviert die Telemetrieausgabe am Pad "Telem." für Graupner HoTT oder Jeti.
(Default: close)
Slave
Derzeit ohne Funktion !!!
Umschaltung ob die FlightCtrl als Master oder Slave genutzt wird => Master = offen / Slave = geschlossen.
(Default: open)
Batt
Anschluss für Versorgungsspannung (Spannung: bis 7S (30V))
(FlightCtrl wird normalerweise über das Molexkabel "MAIN" versorgt)
C/D
I2C Anschluss für BL-Ctrl
(die BL-Ctrl werden normalerweise über das Molexkabel "MAIN" angesteuert)
GND/AD4
- not in use
PC4
- not in use
Pads Seriell

Zusätzlich zum Anschluss UART (Update) ist der serielle Ein-/Ausgang auch an den Pads an der Stirnseite verfügbar. Möchte man diesen seriellen Ein-/Ausgang an der Stirnseite nutzen, muss man sich hier eine 10-polige Stiftleiste anlöten.
Dann kann hieran z.B. das Wi.232, Bluetooth oder das alte MK-USB angeschlossen werden.
INFO:
Der Anschluss UART (Update) und die Seriellen Pads sind parallel geschaltet. Es kann nur ein Anschluss zur gleichen Zeit genutzt werden.
NMEA
Über den Seriellen Anschluss der FlightCtrl V3 können Daten des GPS im NMEA-Format ausgegeben werden.
Gesendet werden die Datensätze RMC & GGA mit 57600 Baud über PIN9 (TxD) und PIN7 (GND).
Einstellungen für die Übertragung der Daten, werden in der Datei "SETTINGS.INI" vorgenommen.
Diese befindet sich auf der microSD-Karte und kann per Editor bearbeitet werden.
Unter NMEA_INTERVAL stellt man den Übertragungsintervall ein (z.B. "500" => 500ms = 0,5s).
Bei Baudrate for PC-UART kann die Übertragungsgeschwindigkeit angepasst werden (z.B. "576" für 57600 Baud oder "96" für 9600 Baud).
Weiterführende Informationen hierzu sind hier hinterlegt: NMEA
LEDs - Statusmeldung
Über die LEDs auf der FlightCtrl V3.0 können verschiedene Statusmeldungen erkannt werden.
LED Status |
||||
NC |
FC |
Ereignis |
||
|
||||
|
|
|
|
Keine Spannungsversorgung |
|
|
|
|
Versorgunsspannung liegt an, alles OK |
|
|
|
|
Kein oder falscher Empfänger angeschlossen oder Sender ist aus |
|
|
|
|
Falscher Mixer ist eingestellt oder Kompass nicht kalibriert oder Magnetfehler oder ... |
|
|
|
|
Software auf NaviCtrl gelöscht (z.B. nach fehlerhaften Update) |
|
|
|
|
Software auf FlightCtrl gelöscht (z.B. nach fehlerhaften Update) |
|
||||
CAM / EXT1 / EXT2 |
Ereignis |
|||
|
Schaltausgang nicht aktiv / nicht geschaltet |
|||
|
Schaltausgang aktiv / geschaltet |
|||
|
||||
|
||||




Empfängeranschlüsse
Bitte darauf achten, dass der richtige Empfänger in den Einstellungen unter "Kanäle" eingestellt wird.
Anschluss Empfänger |
|||
|
|||
Anschluss PPM-Summensignal Empfänger |
|
||
Pad |
Funktion |
Kabelfarbe |
|
Telem. |
n/a |
n/a |
|
|
|||
Graupner HoTT |
|
||
Pad |
Funktion |
Kabelfarbe |
|
Telem. |
Telemetrieanschluss |
Grau |
|
|
|||
Jeti |
|
||
Pad |
Funktion |
Kabelfarbe |
|
Telem. |
Telemetrieanschluss |
Grau |
|
|
|||
Spektrum Satellitenempfänger |
|
||
Pad |
Funktion |
Kabelfarbe |
|
GND |
GND |
Schwarz |
|
|
|||
Futaba S.Bus Empfänger |
|
||
Pad |
Funktion |
Kabelfarbe |
|
5V |
+5V |
Rot |
|





{kind=link}
Software Update
INFO: Die FlightCtrl V3.0 ist bei Auslieferung funktionstüchtig mit der aktuellen Software bespielt.
Ist eine aktuellere Softwareversion als die vorhandene verfügbar, kann man die FlightCtrl V3.0 leicht updaten.
Da die FlightCtrl V3.0 aus zwei Teilen besteht (Flugsteuerung und Navigation), werden zwei Softwarepakete plus passendem KopterTool benötigt:
Programm => Kopter_Tool_Vx_xxx.zip
Software Flugsteuerung => Flight-Ctrl_MEGA1284p_Vx_xxx.hex
Software Navigation => Navi-Ctrl_STR9_Vx_xxx.hex
("x_xxx" steht für die Versionsnummer)
Wichtig hierbei ist, dass diese drei Bestandteile die gleiche Versionsnummer haben! Der Buchstabe am Ende kann beliebig sein.
Download
Das aktuelle Softwarepaket für die FlightCtrl V3.0 kann man hier herunterladen:

Step 1: Datei entpacken

Die heruntergeladene Datei ist eine gepackte Datei mit dem Namen Software_MikroKopter.zip.
In dieser gepackten Datei findet man die benötigte Software und das dazu passende KopterTool.
Am einfachsten entpackt man die benötigte Software und das KopterTool auf den Desktop.
Dazu einfach die .zip Datei mit einem Doppelklick der linken Maustaste öffnen. Die Dateien dann mit dem Mauscursor anwählen und mit gedrückter linker Maustaste auf den Desktop ziehen.
Step 2: KopterTool öffnen

Zuerst öffnen wir den Ordner KopterTool_Vx_xxx (x_xxx = Versionsnummer) und starten das Programm MikroKopter-Tool.exe.
Beim ersten Öffnen des Programmes muss man die Lizenzbedingungen bestätigen und gelangt dann in das eigentliche KopterTool-Fenster.
Ein Klick auf den Button Firmware update & Terminal öffnet dann das Terminalfenster.
Info:
Der Kopter muss hierfür mit dem Computer verbunden sein und der voll aufgeladene Akku ist eingesteckt.
Die Fernsteuerung ist an.
Step 3: Software update

WICHTIG:
Während des Updates darf die Verbindung zwischen Kopter und Computer nicht unterbrochen werden. Der Akku am Kopter muss voll geladen sein.
Im Terminalfenster startet man nun das Update:
Klick auf den Button Update Software (serial)...
Im Software-Fenster Flight-Ctrl_MEGA1284p_Vx_xxx.hex auswählen
Klick auf den Button Öffnen => Update startet
Das Update der Flugsteuerungssoftware läuft nun im Terminalfenster durch.
Hier abwarten, bis am Ende die Initialisierung durchlaufen wurde (weiße Schrift).
Um nun den zweiten Teil der Software einzuspielen starten wir wieder mit:
Klick auf den Button Update Software (serial)...
Im Software-Fenster Navi-Ctrl_STR9_Vx_xxx.hex auswählen
Klick auf den Button Öffnen => Update startet
Das Update der Navigationssoftware läuft nun im Terminalfenster durch.
Auch hier abwarten, bis am Ende die Initialisierung durchlaufen wurde (weiße Schrift).
Mit einem Klick auf den Button to MK-Tool... gelangt man zurück in das Hauptfenster.
Dort kann man dann auch die Versionsnummer im virtuellen Display überprüfen.
(mit den Button NaviCtrl und FlightCtrl wechselt man die Anzeige)
Nach dem Update sollte man die Einstellungen und die Funktionen überprüfen.
Update Fehler

Sollte bei einem Update doch einmal etwas schief gelaufen sein, ist i.d.R die Software auf der FlightCtrl V3.0 gelöscht. In dem Fall kann es so aussehen, als wenn die Verbindung nicht mehr hergestellt werden kann und nichts mehr geht.
Aber keine Panik. Die Software kann leicht wieder neu eingespielt werden.
Folgende Schritte helfen die Software wieder neu einzuspielen:
- Der Kopter ist:
per MK-USB mit dem Computer verbunden (KEINE Funkverbindung nutzen!)
- der Akku ist am Kopter eingesteckt und voll geladen
- Das Terminalfenster ist geöffnet und der richtige COM Port ausgewählt
Startet man das Update, erscheint nun ein TIMEOUT
Nun machen wir folgendes:
- Das Update erneut starten
Erscheint nach 3-4 Punkten (hinter "(try to reset Hardware....)" kein OK ->
- Akkuverbindung öffnen und sofort
- Akkuverbindung schließen
Nun sollte ein OK hinter den Punkten erscheinen und das Update weiter durchlaufen
Info:
Ist das Updaten nicht möglich, bitte den COM Port und die Verbindungen überprüfen.
Kann die Software trotz richtiger Verbindung nicht erneuert werden, bitte den MikroKopter Support kontaktieren: support@hisystems.de
Settings
Damit man den Kopter und die Funktionen mit seiner Fernsteuerung bedienen kann, müssen die Kanäle noch eingestellt werden.
Man kann nun entweder selber die Einstellung der Kanäle und Parameter individuell durchführen,
oder man spielt die in dem aktuellen Softwarepaket bereits enthaltenen Settings in den MikroKopter ein.
(siehe: Software Update - ''Software_!MikroKopter.zip'')
Einen zu diesen Settings passenden Modellspeicher für Graupner HoTT Sender, kann man hier herunterladen: HoTT Sender
Step 1: Setting-Speicher entpacken

In dem heruntergeladenen aktuellen Softwarepaket findet man die benötigte Setting-Datei MK-Setting_(Vx.xx).mkp.
Am einfachsten entpackt man die benötigte Datei auf den Desktop.
Dazu einfach die .zip Datei mit einem Doppelklick der linken Maustaste öffnen. Die Dateien dann mit dem Mauscursor anwählen und mit gedrückter linker Maustaste auf den Desktop ziehen.
Step 2: Setting einspielen

Hat man die Datei MK-Setting_(Vx.xx).mkp entpackt, kann man diese über das KopterTool einspielen. Dazu gehen wir wie folgt vor:
Das KopterTool öffnen
Den Button Settings... anklicken => die Einstellungen öffnen sich
Unten den Button Laden... anklicken
Die Datei MK-Setting_(Vx.xx).mkp auswählen
Mit dem Button Öffnen bestätigen
- Die Kanaleinstellungen werden nun im Einstellungsfenster angezeigt
Die Einstellungen mt dem Button Schreiben in den Kopter schreiben.
INFO: Der Kopter hat 5 Parametersätze (Settings) die individuell eingestellt werden können.
Es ist ratsam diese Einstellungen auf allen 5 Parametersätzen zu speichern. So hat man beim versehentlichen
Umschalten des Parametersatzes immer noch die gleichen Funktionen zur Verfügung.
Dazu einfach die Nummer beim Parametersatz ändern und mit Schreiben in den Kopter speichern.
Am Schluss über den Button OK das Einstellmenü wieder verlassen
Sonstiges
- Der Bootloader der FC3.0 ist nicht öffentlich und kann nicht ausgelesen werden
- Auf keinen Fall darf per ISP (mit Atmel-Programmern etc.) das Programm neu eingespielt oder gelöscht werden
Sollte die FlightCtrl V3.0 defekt sein, wenden Sie sich bitte an den Support von HiSystems: support@hisystems.de