Features of the MikroKopter |

Prolog
MikroKopter are worldwide used and vertical takeoff Aircrafts which aprove their work for loyal service i.e. as a holder for Cameras or sensors.
They are available as a Basicset for Quadro-, Hexa- or OktoKopter]]. Proffesional users can also get an ARF Copter who is ready assembled.
If you will start small? No problem, you can upgrade your copter any time (e.g. from a Quadro to a Okto or with a Set Navigation).
And this easy, cheap and with the existing components.
Flight-Times are, depending on the built and weight, between 15 and 40 minutes. Payloads up to 4kg are possible.
In the magazine RC-Flight-Control you can find some reports about our functions. Here you can find it:
HoTT Telemetry, Autonomous Flying, Point of Interest, FPV, OktoXL
Advantages
The advantages of the MikroKopter in short form:
- Easy-to-assemble
- Individual design of the Kopter is possible
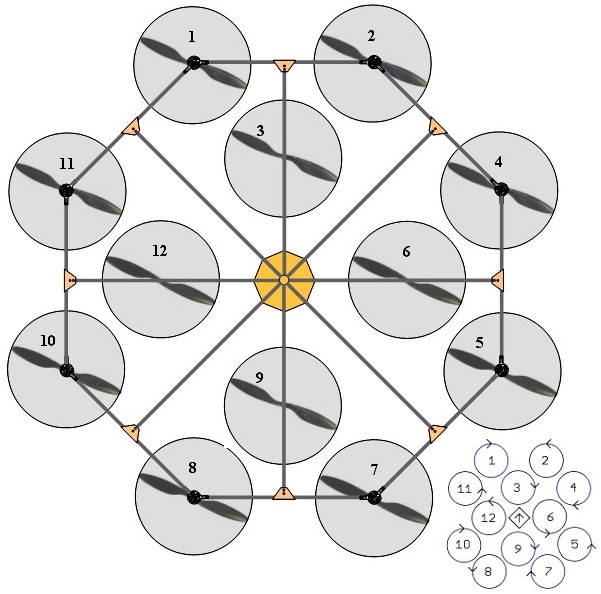
Up to 12 motors can be controlled
- Very easy to fly and reliable
Redundancy (An OktoKopter can be flown safely even one motor failed)
- In "the worst case" very easy to repair
- Our Repair Service and Support helps quickly and easily
Free firmware updates (Download)
- Easily expandable. Existing components can be used
- A basis for alot of applications
- Very high "Fun-Factor" guaranteed
MikroKopter are already used for Aerial photography
or professional film productions (example)
Only a few minutes for a perfect aerial picture
Step 1 |
Step 2 |
Step 3 |
Prepare |
Start |
Controlling and monitoring |
|
|
|



Step 4 |
Step 5 |
Optional: Waypoints |
Ready |
|
|


{kind=link}
Functions

GPS-Flight-Assistance / Autopilot
One of the key units of the MikroKopter is the GPS-Navigation unit (Navicontrol). This autopilot controls the course and position of the copter. PositionHold, ComingHome and Waypoints provide a safe flight through the air.

PositionHold
This feature ensures a precise position holding, even with strong winds. You worry about the perspective of your camera
-> the copter will stay where it is. (Video).
More info are described here: PositionHold

ComingHome
This feature, once activated with a switch on the RC, automatically navigates the copter back to its starting point at a predefined height.
More info are described here: ComingHome

Dynamic Position Hold
Flying manually, the position can be changed while the copter is still controlled by GPS and therefore not affected by wind. Position Hold will be changed navigation unit keeps the copter on course.

Wind und Wetter
Due to a protective cover flying must not be aborted with beginning rainfall.
-> Flying in a storm (Infovideo)

Autostarting and autolanding
With these features even beginners are able the start and land safely: With a switch the copter starts and automatically lifts off and floats at a height of two meters above ground. The same switch smoothly lands the copter. Uncontrollable jumps through unsteady pilots won’t be an issue anymore.
-> Autostarting and landing with Waypoint-Flight-Planning through laptop or Android-tablet.
-> Info Video)

Reduncance
Our OktoKopters keep flying safely even with the failure of a motor. The intelligent attitude/heading system recognizes the missing motor and adjusts the remaining motors accordingly. We offer our clients a redundant attitude/heading system to ensure a safe flight even in case of failure of these devices.
-> Certification by Austro Control

Waypoint
Waypoint flights can be set up conveniently with a Laptop/PC or Android Tablet. Stored waypoint lists can be transmitted to the copter and called up within the RC whenever needed. The flying speed is programmable with a minimum of 0.1 m/sec to a maximum of 15m/sec (54km/h). Additionally speed can be altered during flight through a slider bar or switch on the RC, according to the flying conditions.
-> Info Video

Panorama
Easily create panoramas at the push of a button. The copter rotates and tilts the camera. Beautiful panoramas can be created like the following example:
-> Panorama

Save a position
You have discovered an interesting perspective and would like to come back another time and take pictures? Waypoints and interesting camera perspectives can be saved with the RC during flight. The POIs are stored in the SD-Card of the copter and can be called up again without the need of a PC or tablet.
-> Info Video

Save a tracking shot
3D waypoints can be programmed during flight with the RC. Spontaneous tracking shots can be planned and taken again and again. Flying Speed between the two points on the track can be adjusted from 0.1m/sec to 10m/sec with a switch on the RC. The tracking shot can be called up after a battery change.

Relative Waypoints
Waypoints can be loaded relatively, the copter will fly the preprogrammed pattern on the spot. The pattern rotates according to the orientation of the copter. → This too can be done conveniently with the RC and without the need of a Laptop or Tablet.
This feature can be used for panoramas or large-scale mapping.

POI (Point of interest)
It is possible to program points of interest in 3D space. During flight, the camera will always be oriented towards this point - direction as well as height. This is ideal for keeping buildings or towers in view.

Flexible Autotrigger
A camera can be triggered by waypoints, time-controlled or distance-controlled. A picture every 15m, no matter the speed, is an easy task. This makes large-scale mapping child’s play. This feature can be combined with waypoint-flights -> flying all the corner points as waypoints of a given area will suffice to taking pictures with sufficient overlapping. This reduces the number of waypoints. With only 16 waypoints the same effectiveness can be achieved wherefore other systems would require hundreds of points.

Flightsimulation within the copter
A flight simulator is an integrated part of the firmware of the MikroKopters. The simulation allows the user to use all the original routines within the MikroKopter. The virtual position can be observed at the PC screen and changed with the RC or with waypoints. This is ideal for testing camera shots and waypoint flights. Logfiles are created with the simulated data. Furthermore we habe a flight simulator that allows simulated flight training with the original RC.
(See here: Simulation 1, Simulation 2)
{kind=link}
{kind=link}

Log/flight recorder
Flightdata is stored at 5Hz on the SD card. The logging data contains GPS-position, height, speed, voltage, position of switches, flight attitude, currents of each motor, temperature, announces and more. The file format KML and GPX can be imported within Google Earth directly. Various PC-tools allow detailed analysis of the data. Datalogging at 200Hz is possible only with telemetry.

Take-off weight and payload
Even with a camera, the overall weight will be below 5kg, which is the legal maximum as postulated by the aviation authority. The capability of the copters is astonishing. Large payloads of up to 5kg can be transported..
-> The East Frisian beer drone

Automatic compensation of camera nick
During flight, the copter obviously changes its angle all the time. Servo-controlled camera gimbals compensate these movements. Camera-angle and orientation can be changed by the pilot with a switch or slider bar. This can also be done with a separate RC, hence one person can fly while the other controls the camera.

FailSafe
In case of a failing RC connection, the copter flies back to its starting point automatically. If an undervoltage occurs, the pilot will be notified by audio response and a notification on the display. If the voltage drops below a critical limit, the copter flies back to the starting point and, if required, lands.
-> More information can be found here: FailSafe

LiPoSafe
If the flight battery reaches a preset discharge point, a warning signal will automatically sounds at the copter and the telemetry. If you do not hear it, the copter can automatically fly back to the starting point and land.

State of the art engines
The brushless motors we are using are almost wear-free. They offer high performance in a compact design and can be controlled with high precision. With the help of our own test stand, we are able to determine efficiency of different motor/prop combinations.

Brushless controller of the newest generation
Our self-developed BL-Controls can provide up to 1000W for each motor. Active braking and an energetic recovery system (battery charging during braking) allow spontaneous changes of speed and increases flying time. Currents , temperature and operating status of each controller is being transmitted to the flight attitude control and stored into a logging file. The BL-Controls report overload and motor failure via telemetry. A redundant data bus provides additional safety.

ARM (32Bit) and AVR RISC-Processors
Approx. 12 to 15 processors control the copter (flight attitude, navigation, motor controls, GPS, camera interface, receiver and more) Open source firmware and source code in C and open interfaces allow for modification.

Latest sensor-technology
Our MikroKopter run the latest high-precision gyroscope by Analog Devices. Four accelerometers measure movement and attitude. 3D magnetic field sensors form the compass for navigation. Barometrical altimetry with ACC-sensordatafusion allow for height controlled flying and makes auto starting and landing without a GPS-connection pssible.
-> Demo Video

GPS (Global Positioning System)
GPS-System of the newest generation with high-sensitive GPS preamplifier and SAW-frequency filter. Simultaneous reception of multiple GPS-Systems:
- GPS
- Glonass
BeiDou
GPS-Reception under disadvantageous conditions is possible (e.g. shadowing through building and mountains)

Telemetrie at PC/Tablet
We offer various telemetry systems (up and downlink) with a range of up to 6km (2,4Ghz, 868Mhz or 900MhZ). Observe position and operating data (height, voltage, flying time, currents and more) life at a PC or tablet and control the copter with your PC or tablet. Easy import of Google Earth maps for navigation. Maps can be used offline in addition to your own material.

Telemetrie at RC with up- and downlink
- e.g. Jeti or Graupner HoTT Voice announcements in case of undervoltage and errors. Voltage, height, distance and more can be announced at the push of a button. RC menu-control - e.g. saving and calling of waypoints. Additional Logfiles are logged within the RC. For instance the last GPS-position can be called in case of a
crash.

Flying time
Up to 40 minutes of flying time is possible. Feel free to calculate flying time under different conditions and with our free tools.

Teacher/Student systems
Control of a copter can be transferred to a second RC, this is ideal for flying training. Also the camera controls can be achieved by a second RC.

Camera control and Zoom
Our self-developed digital controls for Sony camcorders allow for the control of the most important functions with the RC:
- Video start/stopp
- Picture taking
- Zoom

Simple operating
Simple and save operating thanks to features like:
- Auto starting/landing
- Programmable flying boundaries

Flying boundaries
Programmable boundaries act like an invisible cage. Just set up maximum height and distance and the copter does not fly further than the edges of the invisible cage.

Out of the box
Our ARF-Systems are ready to fly.
We offer flying training and instructions for self-collectors.

Live Video
Wireless video broadcasting. Watch the live broadcast of the camera at a monitor or with video glasses during flight.
→ Link

Software
Free firmware-updates:
PC-Software 'KopterTool'
- Android flightplanning 'MKTT'
Flightsimulator 'AeroSim'
- Flying time calculator
- Evaluationtool for logfiles

OEM and individual flying systems
Our electronics are being used in an abundance of MultiKopter-systems. It might not always look like MikroKopter, but there might be MikroKopter-controls under the protective cover. The variety of frame designs and propeller number (4-12) are possible – Quadro, Hexa, Okto, Deka and Dodeca.

Source code
The source code is freely available, changes and modifications can be made, new features can be implemented.
Please note: To compile the NaviControl-Code you will need a Lib-Link-license.

Made in Germany
We ourselves are the developers and manufacturers of the entire electronics and firmware - from the FlightControl to the brushless controls. For 15 years we have been developing electronics for the industry and since 2006 we specialize in Multikopter technology.
Several thousand ![]() MikroKopter fly with our electronics.
MikroKopter fly with our electronics.
-> Info Video

Don’t panic
Thanks to our navigation unit and height controls the copter always stays at its position as soon as you release the sticks. Just hit the GPS-switch to activate ComingHome and the copter flies to its starting point automatically.

CareFree 2.0
It is always difficult for untrained pilots to fly with an aircraft of any kind with the nose pointed towards themselves since the controls are inverted. CareFree is the solution for this problem, the copter calculates the exact direction of the pilot (the starting point) and adjusts the controls accordingly. Thus, the pilot can always fly back and forth, left and right, no matter the orientation of the copter. Additionally it is possible to ‚teach‘ a new orientation, meaning that the pilot himself can turn and adjust the directions of the copter.

Click and Fly (1-Point Navigation)
With a simple click of the map the copter can be told where to fly, this is possible with an Android tablet or PC/Laptop. Automatic landing at that spot can be achieved by a simple click .

Boat Mode
This feature enables the copter to start on moving surroundings.

Licensing
If you need larger distances for waypoint-flights or fly waypoints in spite of an RC failure, you can simply load the appropriate license into the copter.

Easy maintenance and modular design
Our system is constructed to be easily mendable and maintainable. If you experience a motor failure or broken parts after a hard landing or a crash of any kind, the copter can be repaired quickly. Most important parts can be changed by clients themselves.