|
Größe: 18655
Kommentar:
|
Größe: 34350
Kommentar:
|
| Gelöschter Text ist auf diese Art markiert. | Hinzugefügter Text ist auf diese Art markiert. |
| Zeile 4: | Zeile 4: |
| ||<class="MK_Nav_Header">Features of the MikroKopter || | ||<class="MK_Nav_Header">Features of the !MikroKopter || |
| Zeile 8: | Zeile 8: |
| * {{http://mikrokopter.de/images/deu.gif}} [[MK-Funktion|deutsch]] * {{http://mikrokopter.de/images/fra.gif}} [[fr/MK-Features|français]] }}} |
* {{http://mikrokopter.de/images/deu.gif}} [[MK-Features|english]] }}} ############################################################################## |
| Zeile 14: | Zeile 14: |
| MikroKopter are widespreaded and vertical takeoff [[VideoListe|Aircrafts]] which aprove their work for loyal service i.e. as a holder for [[HiSightSLR|Cameras]] or sensors. <<BR>> They are available as a [[Nachbau|QuadroKopter]] with four, as a [[Nachbau|HexaKopter]] with six or as an [[Nachbau|OktoKopter]] with eight rotors. <<BR>> MikroKopter can be equipped with [[MKGPS|GPS]] in example and they are able to maintain automatically the position and the height or even fly to [[WaypointGenerator|GPS-Positions]] by themselves. <<BR>> [[FlugZeit|Flight-Times]] are, depending on the built and weight, between 15 and 40 minutes. Payloads up to 2,5kg are possible. <<BR>><<BR>> '''Download:''' [[http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108351|HoTT Telemetry]], [[http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108345|Autonomous Flying]] and [[http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108338|Point of Interest]], [[http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108390|FPV]], [[http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108398|OktoXL]] out of the magazine [[http://rc-flight-control.de/|RC-Flight-Control]] |
!MikroKopter are worldwide used and vertical takeoff Aircrafts which aprove their work for loyal service i.e. as a holder for Cameras or sensors. <<BR>> They are available as a [[Nachbau|Basicset]] for Quadro-, Hexa- or !OktoKopter]]. Proffesional users can also get an [[https://www.mikrocontroller.com/index.php?main_page=index&cPath=114|ARF Copter]] who is ready assembled. <<BR>> If you will start small? No problem, you can upgrade your copter any time (e.g. from a Quadro to a Okto or with a Set Navigation). <<BR>> And this easy, cheap and with the existing components.<<BR>> [[FlugZeit|Flight-Times]] are, depending on the built and weight, between 15 and 40 minutes. Payloads up to 4kg are possible. <<BR>><<BR>> In the magazine [[http://rc-flight-control.de/|RC-Flight-Control]] you can find some reports about our functions. Here you can find it: <<BR>> [[http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108351|HoTT Telemetry]], [[http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108345|Autonomous Flying]], [[http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108338|Point of Interest]], [[http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108390|FPV]], [[http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108398|OktoXL]] <<BR>><<BR>> ############################################################################## |
| Zeile 23: | Zeile 30: |
| ||<class="MK_THeader">Advantages || ||<#F2F2F2>- Easy-to-assemble || ||<#FAFAFA>- Individual design of the Kopter is possible || ||<#F2F2F2>- Up to 12 motors can be controlled || ||<#FAFAFA>- Very easy to fly and reliable || ||<#F2F2F2>- Redundancy (An OktoKopter can be flown safely even one motor failed) || ||<#FAFAFA>- Used for aerial photos || ||<#F2F2F2>- In "the worst case" very easy to repair || ||<#FAFAFA>- Easily expandable. Existing components can be used. || ||<#F2F2F2>- A basis for alot of applications || ||<#FAFAFA>- Very high "Fun-Factor" guaranteed || ||<#F2F2F2>- MikroKopter are already used for professional film productions || |
The advantages of the !MikroKopter in short form: * Easy-to-assemble * Individual design of the Kopter is possible * Up to [[http://gallery3.mikrokopter.de/var/albums/Nachbau/Formation_X.jpg?m=1409695011|12 motors]] can be controlled * Very easy to fly and reliable * Redundancy (An OktoKopter can be flown safely even one motor failed) * In "the worst case" very easy to repair * Our Repair Service and Support helps quickly and easily * Free firmware updates ([[Download]]) * Easily expandable. Existing components can be used * A basis for alot of applications * Very high "Fun-Factor" guaranteed * MikroKopter are already used for [[http://forum.mikrokopter.de/topic-993-9.html|Aerial photography]] or professional film productions ([[http://www.mikrokopter.de/ucwiki/VideoAbspielen?id=230|example]]). <<BR>><<BR>> ############################################################################## |
| Zeile 37: | Zeile 52: |
| ||<#F2F2F2 style="text-align:center">Prepare||<#F2F2F2 style="text-align:center">Start||<#F2F2F2 style="text-align:center">Control and verify||<#F2F2F2 style="text-align:center">Optional: Waypoints||<#F2F2F2 style="text-align:center">Ready|| ||[[http://gallery.mikrokopter.de/main.php/v/Nachbau/MikroKopter_Verschiedene_mit_HolgerBuss1.jpg.html|{{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=116716}}]]||[[http://gallery.mikrokopter.de/main.php/v/Nachbau/Okto_XL_8_Luft_5D_001.jpg.html|{{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=116735}}]]||[[http://gallery.mikrokopter.de/main.php/v/Nachbau/MC-32_Monitor.jpg.html|{{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=116700}}]]||[[http://gallery.mikrokopter.de/main.php/v/Nachbau/Bild1_ScreenKoptertool1_Pfeile.gif.html?g2_imageViewsIndex=1|{{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=116770}}]]||[[http://gallery.mikrokopter.de/main.php/v/Luftbilder/Bild8_Wegpunkt3c.jpg.html|{{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=77829}}]]|| ||<#F2F2F2 style="text-align:center">Mount batterie and camera||<#F2F2F2 style="text-align:center">GPS-aided flight||<#F2F2F2 style="text-align:center">Telemetry live view of the camera||<#F2F2F2 style="text-align:center">PC-controlled route||||<#F2F2F2 style="text-align:center">Photo and HD-video|| == Features == ||<tablewidth="90%"class="MK_THeader">Features ||<width="100px" class="MK_THeader">Contains ||<width="110px" class="MK_THeader">Info-Link || ||<#FAFAFA>- Fast connection of the power supply and the I2C-Bus via a header ||<#FAFAFA style="text-align:center"> {{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108041&g2_serialNumber=2}}||<#FAFAFA style="text-align:center">[[en/FlightCtrl_ME_2_1|{{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108039&g2_serialNumber=2}}]]|| ||<#F2F2F2>- Easy connection of additional PCBs ||<#F2F2F2 style="text-align:center"> {{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108041&g2_serialNumber=2}} ||<#F2F2F2 style="text-align:center">[[en/MK-Tower|{{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108039&g2_serialNumber=2}}]]|| ||<#FAFAFA>- Convenient and easy setup of the software via the !KopterTool ||<#FAFAFA style="text-align:center"> {{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108041&g2_serialNumber=2}} ||<#FAFAFA style="text-align:center">[[en/MikroKopterTool|{{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108039&g2_serialNumber=2}}]]|| ||<#F2F2F2>- Controlling the Kopter in all directions and to execute functions via a simple transmitter are possible ||<#F2F2F2 style="text-align:center"> {{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108041&g2_serialNumber=2}} ||<#F2F2F2 style="text-align:center">[[en/Sender|{{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108039&g2_serialNumber=2}}]]|| ||<#FAFAFA>- Connection of different types of receiver are possible (i.e. PPM Sum-signal, Spektrum Satellite, Graupner HoTT, Futaba S.Bus, etc.) ||<#FAFAFA style="text-align:center"> {{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108041&g2_serialNumber=2}} ||<#FAFAFA style="text-align:center">[[en/FlightCtrl_ME_2_1#Receiver_Connection|{{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108039&g2_serialNumber=2}}]]|| ||<#F2F2F2>- Automatic position stabilizer ||<#F2F2F2 style="text-align:center"> {{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108041&g2_serialNumber=2}} ||<#F2F2F2 style="text-align:center">|| ||<#F2F2F2>- Automatic take off and land ||<#F2F2F2 style="text-align:center"> {{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108041&g2_serialNumber=2}} ||<#F2F2F2 style="text-align:center">|| ||<#FAFAFA>- Automatic Height-control ||<#FAFAFA style="text-align:center"> {{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108041&g2_serialNumber=2}} ||<#FAFAFA style="text-align:center">[[en/MK-Parameter/Altitude|{{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108039&g2_serialNumber=2}}]] + [[en/heightsensor|{{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108039&g2_serialNumber=2}}]]|| ||<#F2F2F2>- Connection for up to 5 servos for external control functions (i.e. camera mount) ||<#F2F2F2 style="text-align:center"> {{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108041&g2_serialNumber=2}} ||<#F2F2F2 style="text-align:center">[[en/FlightCtrl_ME_2_1#Connections|{{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108039&g2_serialNumber=2}}]]|| ||<#FAFAFA>- Automatic compensation of an optional attached camera mount ||<#FAFAFA style="text-align:center"> {{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108041&g2_serialNumber=2}} ||<#FAFAFA style="text-align:center">[[en/CameraConnect|{{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108039&g2_serialNumber=2}}]]|| ||<#F2F2F2>- Adjustable battery warning (Low-voltage warning) with a signal via a buzzer ||<#F2F2F2 style="text-align:center"> {{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108041&g2_serialNumber=2}} ||<#F2F2F2 style="text-align:center">[[en/MK-Parameter/Misc|{{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108039&g2_serialNumber=2}}]]|| ||<#FAFAFA>- Two individual switchable outputs for a connection and the control of i.e. the lighting or a camera trigger ||<#FAFAFA style="text-align:center"> {{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108041&g2_serialNumber=2}} ||<#FAFAFA style="text-align:center">[[en/MK-Parameter/Output|{{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108039&g2_serialNumber=2}}]]|| ||<#F2F2F2>- Data transmission modules can be connected (i.e. Wi.232/Bluetooth) ||<#F2F2F2 style="text-align:center"> {{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108041&g2_serialNumber=2}} ||<#F2F2F2 style="text-align:center">[[en/BT-AP10|{{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108039&g2_serialNumber=2}}]] + [[en/RadioTronix|{{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108039&g2_serialNumber=2}}]]|| ||<#FAFAFA>- Display of the telemetry data of the Kopters on the ground <<BR>> (i.e. on the MX-20 HoTT transmitter, via the Jeti-system or via an APP on your cellphone) ||<#FAFAFA style="text-align:center"> {{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108041&g2_serialNumber=2}} ||<#FAFAFA style="text-align:center">[[en/HoTT|{{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108039&g2_serialNumber=2}}]]/[[JetiBox|{{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108039&g2_serialNumber=2}}]]/[[http://de.androidzoom.com/android_applications/tools/dubwise_dghs.html|{{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108039&g2_serialNumber=2}}]]|| ||<#F2F2F2>- Acoustic signaling of error messages ||<#F2F2F2 style="text-align:center"> {{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108041&g2_serialNumber=2}} ||<#F2F2F2 style="text-align:center">|| ||<#FAFAFA>- ||<#FAFAFA style="text-align:center"> {{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108040&g2_serialNumber=2}} ||<#FAFAFA style="text-align:center"> || ||<#F2F2F2>- ||<#F2F2F2 style="text-align:center"> {{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108040&g2_serialNumber=2}} ||<#F2F2F2 style="text-align:center"> || ||<#FAFAFA>- ||<#FAFAFA style="text-align:center"> {{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108040&g2_serialNumber=2}} ||<#FAFAFA style="text-align:center"> || <<BR>> ||<tablewidth="90%"class="MK_THeader">Additional functions with GPS-System ||<width="100px" class="MK_THeader">Contains ||<width="110px" class="MK_THeader">Info-Link || ||<#F2F2F2>- Automatic hold of the position (!PositionHold) ||<#F2F2F2 style="text-align:center"> {{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108041&g2_serialNumber=2}} ||<#F2F2F2 style="text-align:center">[[en/PositionHold|{{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108039&g2_serialNumber=2}}]]|| ||<#FAFAFA>- Automatic backflight to the start point (!ComingHome) ||<#FAFAFA style="text-align:center"> {{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108041&g2_serialNumber=2}} ||<#FAFAFA style="text-align:center">[[en/ComingHome|{{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108039&g2_serialNumber=2}}]]|| ||<#F2F2F2>- Automatic !FailSafe during loss of signal with automatic landing ||<#F2F2F2 style="text-align:center"> {{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108041&g2_serialNumber=2}} ||<#F2F2F2 style="text-align:center">[[en/FailSafe|{{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108039&g2_serialNumber=2}}]]|| ||<#FAFAFA>- Independent direction control (!CareFree) ||<#FAFAFA style="text-align:center"> {{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108041&g2_serialNumber=2}} ||<#FAFAFA style="text-align:center">[[en/CareFree|{{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108039&g2_serialNumber=2}}]]|| ||<#F2F2F2>- Automatic !WayPoint-Flight (WP) ||<#F2F2F2 style="text-align:center"> {{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108041&g2_serialNumber=2}} ||<#F2F2F2 style="text-align:center">[[en/MikroKopterTool-OSD|{{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108039&g2_serialNumber=2}}]]|| ||<#FAFAFA>- Automatic flight of Point Of Interest (POI) ||<#FAFAFA style="text-align:center"> {{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108041&g2_serialNumber=2}} ||<#FAFAFA style="text-align:center">[[en/MikroKopterTool-OSD|{{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108039&g2_serialNumber=2}}]]|| ||<#F2F2F2>- Automatic flight of grid areas ||<#F2F2F2 style="text-align:center"> {{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108041&g2_serialNumber=2}} ||<#F2F2F2 style="text-align:center">[[en/WaypointGenerator/Area|{{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108039&g2_serialNumber=2}}]]|| ||<#FAFAFA>- Automatically creates panorama-images ||<#FAFAFA style="text-align:center"> {{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108041&g2_serialNumber=2}} ||<#FAFAFA style="text-align:center">[[en/WaypointGenerator/Panorama|{{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108039&g2_serialNumber=2}}]]|| ||<#F2F2F2>- Automatic flights of POI/WP with triggering a camera to the same time ||<#F2F2F2 style="text-align:center"> {{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108041&g2_serialNumber=2}} ||<#F2F2F2 style="text-align:center">[[en/CameraConnect|{{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108039&g2_serialNumber=2}}]]|| ||<#FAFAFA>- Determining the current position of the Kopter ||<#FAFAFA style="text-align:center"> {{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108041&g2_serialNumber=2}} ||<#FAFAFA style="text-align:center">[[en/MikroKopterTool-OSD#GPS_Coordinates|{{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108039&g2_serialNumber=2}}]]|| ||<#F2F2F2>- Displays the current position of the Kopter via the KopterTool-OSD in a map ||<#F2F2F2 style="text-align:center"> {{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108041&g2_serialNumber=2}} ||<#F2F2F2 style="text-align:center">[[en/MikroKopterTool-OSD#Use_of_maps|{{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108039&g2_serialNumber=2}}]]|| ||<#FAFAFA>- Display of the telemetry data in the KopterTool-OSD (or at the transmitter via Jeti- or HoTT-System) ||<#FAFAFA style="text-align:center"> {{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108041&g2_serialNumber=2}} ||<#FAFAFA style="text-align:center">[[en/MikroKopterTool-OSD#Display_Data|{{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108039&g2_serialNumber=2}}]]|| ||<#F2F2F2>- Automatically follows a !FollowMe transmitter ||<#F2F2F2 style="text-align:center"> {{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108041&g2_serialNumber=2}} ||<#F2F2F2 style="text-align:center">[[en/FollowMe|{{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108039&g2_serialNumber=2}}]]|| ||<#FAFAFA>- Set !WayPoints at the current position of the Kopter ||<#FAFAFA style="text-align:center"> {{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108041&g2_serialNumber=2}} ||<#FAFAFA style="text-align:center">[[en/MikroKopterTool-OSD#Set_WayPoints|{{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108039&g2_serialNumber=2}}]]|| ||<#F2F2F2>- ||<#F2F2F2 style="text-align:center"> {{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108040&g2_serialNumber=2}} ||<#F2F2F2 style="text-align:center"> || ||<#FAFAFA>- ||<#FAFAFA style="text-align:center"> {{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108040&g2_serialNumber=2}} ||<#FAFAFA style="text-align:center"> || ||<#F2F2F2>- ||<#F2F2F2 style="text-align:center"> {{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108040&g2_serialNumber=2}} ||<#F2F2F2 style="text-align:center"> || ||<#FAFAFA>- ||<#FAFAFA style="text-align:center"> {{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108040&g2_serialNumber=2}} ||<#FAFAFA style="text-align:center"> || ||<#F2F2F2>- ||<#F2F2F2 style="text-align:center"> {{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108040&g2_serialNumber=2}} ||<#F2F2F2 style="text-align:center"> || ||<#FAFAFA>- ||<#FAFAFA style="text-align:center"> {{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108040&g2_serialNumber=2}} ||<#FAFAFA style="text-align:center"> || ||<#F2F2F2>- ||<#F2F2F2 style="text-align:center"> {{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108040&g2_serialNumber=2}} ||<#F2F2F2 style="text-align:center"> || ||<#FAFAFA>- ||<#FAFAFA style="text-align:center"> {{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108040&g2_serialNumber=2}} ||<#FAFAFA style="text-align:center"> || ||<#F2F2F2>- ||<#F2F2F2 style="text-align:center"> {{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108040&g2_serialNumber=2}} ||<#F2F2F2 style="text-align:center"> || ||<#FAFAFA>- ||<#FAFAFA style="text-align:center"> {{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108040&g2_serialNumber=2}} ||<#FAFAFA style="text-align:center"> || ||<#F2F2F2>- ||<#F2F2F2 style="text-align:center"> {{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108040&g2_serialNumber=2}} ||<#F2F2F2 style="text-align:center"> || ||<#FAFAFA>- ||<#FAFAFA style="text-align:center"> {{http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=108040&g2_serialNumber=2}} ||<#FAFAFA style="text-align:center"> || ########################################################################################################################################################### |
||<class="MK_TableNoBorder"#F2F2F2 style="text-align:center">'''Step 1'''||<class="MK_TableNoBorder"#F2F2F2 style="text-align:center">'''Step 2'''||<class="MK_TableNoBorder"#F2F2F2 style="text-align:center">'''Step 3'''|| ||<class="MK_TableNoBorder"#F2F2F2 style="text-align:center">__Prepare__<<BR>>''Install the battery and camera''||<class="MK_TableNoBorder"#F2F2F2 style="text-align:center">__Start__<<BR>>''GPS-stabilized flight''||<class="MK_TableNoBorder"#F2F2F2 style="text-align:center">__Controlling and monitoring__<<BR>>''Telemetrie and Live picture of the camera''|| ||<class="MK_TableNoBorder">{{ http://gallery3.mikrokopter.de/var/thumbs/Nachbau/MikroKopter_Verschiedene_mit_HolgerBuss1.jpg?m=1410789072 }}||<class="MK_TableNoBorder">{{ http://gallery3.mikrokopter.de/var/thumbs/Nachbau/Okto_XL_8_Luft_5D_001.jpg?m=1410813092 }}||<class="MK_TableNoBorder">{{ http://gallery3.mikrokopter.de/var/thumbs/Nachbau/MC-32_Monitor.jpg?m=1410801242 }}|| <<BR>><<BR>> ||<class="MK_TableNoBorder"#F2F2F2 style="text-align:center">'''Step 4'''||<class="MK_TableNoBorder"#F2F2F2 style="text-align:center">'''Step 5'''|| ||<class="MK_TableNoBorder"#F2F2F2 style="text-align:center">__Optional: Waypoints__<<BR>>''PC-controlled route''||<class="MK_TableNoBorder"#F2F2F2 style="text-align:center">__Ready__<<BR>>''Pictures and HD-Videos''|| ||<class="MK_TableNoBorder">{{ http://gallery3.mikrokopter.de/var/thumbs/Nachbau/Bild1_ScreenKoptertool1_Pfeile.gif?m=1410816615 }}||<class="MK_TableNoBorder">{{ http://gallery3.mikrokopter.de/var/thumbs/Luftbilder/Bild8_Wegpunkt3c.jpg?m=1410787359 }}|| <<BR>><<BR>> ############################################################################## = Functions = ------ ######################################### ## Bild Links (GPS-Flugassistenten / Autopilot) {{{#!html <div style="float: left; margin: 30px;"> }}} {{ http://gallery3.mikrokopter.de/var/albums/intern/sonstiges/1-Funktionen/Kapit%C3%A4n2.png?m=1412606382 || class="feature-icon"}} {{{#!html </div> }}} <<BR>> ''' GPS-Flugassistenten / Autopilot ''' <<BR>> One of the key units of the MikroKopter is the GPS-Navigation unit (Navicontrol). This autopilot controls the course and position of the copter. !PositionHold, !ComingHome and Waypoints provide a safe flight through the air. <<BR>><<BR>><<BR>> ---- ######################################### ## Bild Links (PositionHold) {{{#!html <div style="float: left; margin: 30px;"> }}} {{ http://gallery3.mikrokopter.de/var/albums/intern/sonstiges/1-Funktionen/PositionHold2.png?m=1412606390 || class="feature-icon" }} {{{#!html </div> }}} <<BR>> ''' !PositionHold ''' <<BR>> Auch bei Wind hält der Kopter präzise seine Position. Konzentrieren Sie sich auf die Kameraperspektive<<BR>> -> der Kopter bleibt wo er ist ([[https://www.youtube.com/watch?v=tl6MGE39v_A&list=UUXv7l7VoJSViTQ6skMGmuSg|Video]]).<<BR>> Mehr Infos sind hier beschrieben: PositionHold <<BR>><<BR>><<BR>> ---- ######################################### ## Bild Links (ComingHome) {{{#!html <div style="float: left; margin: 30px;"> }}} {{ http://gallery3.mikrokopter.de/var/albums/intern/sonstiges/1-Funktionen/ComingHome2.png?m=1412606377 || class="feature-icon" }} {{{#!html </div> }}} <<BR>> ''' !ComingHome ''' <<BR>> Ein Schalter am Sender lässt den Kopter jederzeit zurück zum Startpunkt fliegen. Auf Wunsch geht er dabei auf eine vordefinierte Höhe.<<BR>> Mehr Infos sind hier beschrieben: ComingHome <<BR>><<BR>><<BR>> ---- ######################################### ## Bild Links (Dynamic Position Hold) {{{#!html <div style="float: left; margin: 30px;"> }}} {{ http://gallery3.mikrokopter.de/var/albums/intern/sonstiges/1-Funktionen/DPH2.png?m=1412606377 || class="feature-icon" }} {{{#!html </div> }}} <<BR>> ''' Dynamic Position Hold ''' <<BR>> Auch im manuellen Flug wird der Kopter trotzdem per GPS geleitet und driftet nicht vom Wind ab - per Sender wird nur Geschwindigkeit und Richtung vorgegeben, die Navigationseinheit hält den Kopter auf Kurs. So lässt sich auch bei Wind die Position präzise verschieben. <<BR>><<BR>><<BR>> ---- ######################################### ## Bild Links (Wind und Wetter) {{{#!html <div style="float: left; margin: 30px;"> }}} {{ http://gallery3.mikrokopter.de/var/albums/intern/sonstiges/1-Funktionen/Wind-Wetter2.png?m=1412606397 || class="feature-icon" }} {{{#!html </div> }}} <<BR>> ''' Wind und Wetter ''' <<BR>> Unser Kopter ist durch eine Haube gegen Niederschlag geschützt. Der Einsatz muss auch bei einsetzendem Regen nicht abgebrochen werden. -> Fliegen auch bei Sturm ([[https://www.youtube.com/watch?v=WFDvhSNXONU|Infovideo]]) <<BR>><<BR>><<BR>> ---- ######################################### ## Bild Links (Autostart + Autolanden) {{{#!html <div style="float: left; margin: 30px;"> }}} {{ http://gallery3.mikrokopter.de/var/albums/intern/sonstiges/1-Funktionen/AutoStartLand2.png?m=1412606371 || class="feature-icon" }} {{{#!html </div> }}} <<BR>> ''' Autostart + Autolanden ''' <<BR>> Damit kommen auch Anfänger klar: Per Schalter startet der Kopter automatisch und schwebt in ca. 2m Höhe vor Ihnen. Mit dem selben Schalter geht der Kopter auch in den sanften Landeanflug. Hüpfer durch unsichere Piloten gehören damit der Vergangenheit an. <<BR>> -> Auto-Start und -Landung auch bei Waypoint-Planung per Laptop / Android-Tablet möglich.<<BR>> -> [[https://www.youtube.com/watch?v=FSrhvV3QWy0|Infovideo]]) <<BR>><<BR>><<BR>> ---- ######################################### ## Bild Links (Redundanz) {{{#!html <div style="float: left; margin: 30px;"> }}} {{ http://gallery3.mikrokopter.de/var/albums/intern/sonstiges/1-Funktionen/Redundanz2.png?m=1412606391 || class="feature-icon" }} {{{#!html </div> }}} <<BR>> ''' Redundanz ''' <<BR>> Unsere OktoKopter fliegen auch beim Ausfall eines Motors sicher weiter. Die intelligente Fluglageregelung erkennt dies und regelt die verbleibenden Motoren sofort nach. Wir bieten auch die Fluglageregler redundant an – dann bleibt der MK auch bei Ausfall dieser Komponenten unter Kontrolle. -> [[http://www.mikrokopter.de/de/austro|Zertifizierung durch AustroControl]] <<BR>><<BR>><<BR>> ---- ######################################### ## Bild Links (Waypoint) {{{#!html <div style="float: left; margin: 30px;"> }}} {{ http://gallery3.mikrokopter.de/var/albums/intern/sonstiges/1-Funktionen/WayPoint2.png?m=1412606396 || class="feature-icon" }} {{{#!html </div> }}} <<BR>> ''' Waypoint ''' <<BR>> Waypoint Flüge lassen sich bequem am Laptop/PC oder Android Tablet planen. Gespeicherte Waypoint listen lassen sich im Kopter speichern und per Sender auf dem Flugfeld aufrufen. Die Fluggeschwindigkeit ist programmierbar von 0,1m/sek mit max. 15m/sek -> 54km/h. Die Geschwindigkeit kann im Wegpunkteflug auch per Sender (z.B. Schieberegler) vorgegeben werden (0,1m/sek – 15m/sek). So können Sie auf dem Feld den Flug den Begebenheiten anpassen.<<BR>> -> [[https://www.youtube.com/watch?v=tGYpaHt_KSQ|Infovideo]] <<BR>><<BR>><<BR>> ---- ######################################### ## Bild Links (Panorama) {{{#!html <div style="float: left; margin: 30px;"> }}} {{ http://gallery3.mikrokopter.de/var/albums/intern/sonstiges/1-Funktionen/Pano2.png?m=1412606389 || class="feature-icon" }} {{{#!html </div> }}} <<BR>> ''' Panorama ''' <<BR>> Einfache Erstellung eines Panoramas per Knopfdruck. Der Kopter dreht sich und neigt die Kamerahalterung. Dadurch entstehen wundervolle Panoramen wie z.B. (Link) <<BR>><<BR>><<BR>> ---- ######################################### ## Bild Links (Positionen speichern) {{{#!html <div style="float: left; margin: 30px;"> }}} {{ http://gallery3.mikrokopter.de/var/albums/intern/sonstiges/1-Funktionen/PositionSpeichern2.png?m=1412606391 || class="feature-icon" }} {{{#!html </div> }}} <<BR>> ''' Positionen speichern ''' <<BR>> Interessante Perspektive gefunden? Wollen Sie genau das selbe Foto von dieser Position im Winter noch einmal schießen? Wegpunkte und interessante Kamerapositionen können während während des Fluges bequem per Sender gespeichert werden. Die Punkte landen auf der SD-Karte im Kopter und können später wieder aufgerufen werden. PC/Tablet sind dafür nicht nötig.<<BR>> -> [https://www.youtube.com/watch?v=l4VKuqAP-G0|Infovideo]] <<BR>><<BR>><<BR>> ---- ######################################### ## Bild Links (Kamerafahrten speichern) {{{#!html <div style="float: left; margin: 30px;"> }}} {{ http://gallery3.mikrokopter.de/var/albums/intern/sonstiges/1-Funktionen/Kamerfahrt2.png?m=1412666896 || class="feature-icon" }} {{{#!html </div> }}} <<BR>> ''' Kamerafahrten speichern ''' <<BR>> Per Sender lassen sich während des Fluges 3D-Wegpunkte programmieren. So kann spontan eine Kamerafahrt geplant werden die wieder und wieder abgefahren wird. Die Geschwindigkeit zwischen den Punkten kann während des Fluges mittels Regler am Senders von sehr langsam (0,1m/s) bis sehr schnell (10m/s) justiert werden. Auch nach einem Akkuwechsel kann die selbe Kamerafahrt wieder aufgerufen werden. <<BR>><<BR>><<BR>> ---- ######################################### ## Bild Links (Relative Wegpunkte) {{{#!html <div style="float: left; margin: 30px;"> }}} {{ http://gallery3.mikrokopter.de/var/albums/intern/sonstiges/1-Funktionen/Relativ2.png?m=1412667338 || class="feature-icon" }} {{{#!html </div> }}} <<BR>> ''' Relative Wegpunkte ''' <<BR>> Laden sie Wegpunkte relativ und der Kopter fliegt das vorprogrammierte Muster an Ort- und Stelle ab. Das Muster dreht sich sogar mit der Kopter-Ausrichtung beim Start. → auch das geht bequem per Sendermenü und ohne Laptop auf dem Feld. Optimal z.B. für Panoramen oder um Gelände großflächig zu kartografieren <<BR>><<BR>><<BR>> ---- ######################################### ## Bild Links (POI (Point of interest)) {{{#!html <div style="float: left; margin: 30px;"> }}} {{ http://gallery3.mikrokopter.de/var/albums/intern/sonstiges/1-Funktionen/POI2.png?m=1412606390 || class="feature-icon" }} {{{#!html </div> }}} <<BR>> ''' POI (Point of interest) ''' <<BR>> Programmierbarer Point Of Interest (POI) in 3D -> Die Kamera wird immer auf diesen Punkt gerichtet - sowohl die Richtung, als auch die Höhe. Ideal um Gebäude, Türme im Blick zu halten. <<BR>><<BR>><<BR>> ---- ######################################### ## Bild Links (Flexibles Autotrigger) {{{#!html <div style="float: left; margin: 30px;"> }}} {{ http://gallery3.mikrokopter.de/var/albums/intern/sonstiges/1-Funktionen/AutoTrigger2.png?m=1412606372 || class="feature-icon" }} {{{#!html </div> }}} <<BR>> ''' Flexibles Autotrigger ''' <<BR>> Eine Kamera kann entweder zeitgesteuert, per Wegpunkt oder sogar abstandsgesteuert ausgelöst werden. Alle 15m ein Foto, egal wie schnell man fliegt? Kein Problem! Damit wird das Abfotografieren von großen Flächen zum Kinderspiel. Dieses Feature lässt sich auch mit Waypoint-Flügen kombinieren -> es reicht also, vom Gebiet nur die Eckpunke per Waypoints anzufliegen. Trotzdem werden Fotos mit ausreichender Überlappung gemacht. Dies reduziert die Anzahl von Wegpunkten erheblich. Mit z.B. 16 Wegpunkten erreicht dieses System die selbe effektivität, wofür andere hunderte Punkte bräuchten. <<BR>><<BR>><<BR>> ---- ######################################### ## Bild Links (Flugsimulation im Kopter) {{{#!html <div style="float: left; margin: 30px;"> }}} {{ http://gallery3.mikrokopter.de/var/albums/intern/sonstiges/1-Funktionen/Flugsimulator2.png?m=1412606380 || class="feature-icon" }} {{{#!html </div> }}} <<BR>> ''' Flugsimulation im Kopter ''' <<BR>> Eine Flugsimulation ist in der Firmware des MikroKopters integriert. In der Simulation läuft der Flug mit den originalen Routinen im MikroKopter ab. Die virtuelle Position kann am PC beobachtet und per Sender oder Wegpunkten gesteuert werden. Optimal zum Testen von Kamera-Auslösungen bei Wegpunktflügen usw. Selbst Logfiles werden mit den Simulierten Daten erzeugt. Außerdem haben wir einen Flugsimulator, der Flugtraining mit dem originalen Sender erlaubt. (Siehe: [[http://gallery3.mikrokopter.de/var/albums/tech/Eifelt_02_GE.gif?m=1409717456|Simulation 1]], [[http://gallery3.mikrokopter.de/var/albums/tech/Eifelt_02_Arrow.gif?m=1409717454|Simulation 2]]) <<BR>><<BR>><<BR>> ---- ######################################### ## Bild Links (Logbuch/Flugschreiber) {{{#!html <div style="float: left; margin: 30px;"> }}} {{ http://gallery3.mikrokopter.de/var/albums/intern/sonstiges/1-Funktionen/LOG2.png?m=1412606385 || class="feature-icon" }} {{{#!html </div> }}} <<BR>> ''' Logbuch/Flugschreiber ''' <<BR>> Die Flugdaten werden mit 5Hz auf einer SD-Karte gespeichert.Geloggt werden GPS-Position, Höhe, Geschwindigkeit, Spannung, Schalterstellungen, Fluglage, Einzelströme der Motoren, Temperaturen, Ansagen usw. Die Dateiformate KML und GPX können direkt in Google Earth importiert werden. Detaillierte Auswertemöglichkeiten mittels diverser PC-Tools. Datenlogging mit bis zu 200Hz ist per Telemetrie ebenfalls möglich. <<BR>><<BR>><<BR>> ---- ######################################### ## Bild Links (Abfluggewicht und Nutzlast) {{{#!html <div style="float: left; margin: 30px;"> }}} {{ http://gallery3.mikrokopter.de/var/albums/intern/sonstiges/1-Funktionen/Payload2.png?m=1412606389 || class="feature-icon" }} {{{#!html </div> }}} <<BR>> ''' Abfluggewicht und Nutzlast ''' <<BR>> Auch mit Kamera kann das Gesamtgewicht unter den von der Luftfahrtbehörde geforderten 5kg bleiben. Die Leistungsfähigkeit des Kopters ist erstaunlich. Auch hohe Nutzlasten von bis zu 5kg können transportiert werden.<<BR>> -> [[https://www.youtube.com/watch?v=1uNqOfJHKF4|Die ostfriesische Bierdrohne]] <<BR>><<BR>><<BR>> ---- ######################################### ## Bild Links (Automatischer Ausgleich der Kameraneigung) {{{#!html <div style="float: left; margin: 30px;"> }}} {{ http://gallery3.mikrokopter.de/var/albums/intern/sonstiges/1-Funktionen/KameraAusgleich2.png?m=1412606382 || class="feature-icon" }} {{{#!html </div> }}} <<BR>> ''' Automatischer Ausgleich der Kameraneigung ''' <<BR>> Prinzipbedingt ändert ein Kopter laufend seine Lagewinkel, um zu steuern. Elektronische Kameragimbals gleichen die Bewegung automatisch aus. Kamera-Winkel und Richtung können vom Piloten mittels Schieberegler am Sender selbst verändert werden. Kamerasteuerung per zweiten Sender ist ebenfalls möglich (eine Person fliegt und der andere steuert die Kamera). <<BR>><<BR>><<BR>> ---- ######################################### ## Bild Links (Failsafe) {{{#!html <div style="float: left; margin: 30px;"> }}} {{ http://gallery3.mikrokopter.de/var/albums/intern/sonstiges/1-Funktionen/FailSafe2.png?m=1412606379 || class="feature-icon" }} {{{#!html </div> }}} <<BR>> ''' !FailSafe ''' <<BR>> Der Kopter fliegt bei Empfangsausfall autonom zurück und landet beim Startpunkt. Bei Unterspannung wird der Pilot per Sprachausgabe und Anzeige gewarnt. Sinkt die Spannung unter eine kritische Grenze, fliegt der Kopter autonom zurück und geht bei Bedarf sogar in den Landeflug.<<BR>> -> Mehr Infos findet man hier: FailSafe <<BR>><<BR>><<BR>> ---- ######################################### ## Bild Links (LiPoSafe) {{{#!html <div style="float: left; margin: 30px;"> }}} {{ http://gallery3.mikrokopter.de/var/albums/intern/sonstiges/1-Funktionen/Batterie2.png?m=1412678069 || class="feature-icon" }} {{{#!html </div> }}} <<BR>> ''' !LiPosafe ''' <<BR>> Erreicht die Flugbatterie einen voreingestellten Entladepunkt, ertönt automatisch am Kopter und über die Telemetrie ein Warnsignal. Sollte man dies nicht hören, kann der Kopter bei weiteren Warnschwellen automatisch zum Startpunkt zurückfliegen und auch landen. <<BR>><<BR>><<BR>> ---- ######################################### ## Bild Links (Moderne Antriebe) {{{#!html <div style="float: left; margin: 30px;"> }}} {{ http://gallery3.mikrokopter.de/var/albums/intern/sonstiges/1-Funktionen/Antrieb2.png?m=1412606371 || class="feature-icon" }} {{{#!html </div> }}} <<BR>> ''' Moderne Antriebe ''' <<BR>> Die bürstenlosen Motoren sind nahezu verschleißfrei. Sie bieten hohe Leistungsfähigkeit in kompakter Bauform und lassen sich ausgezeichnet regeln. Wir haben eigene Motoren-Teststände zur Vermessung der Wirkungsgrade von Motor/Propeller-Kombinationen <<BR>><<BR>><<BR>> ---- ######################################### ## Bild Links (Motorregler der neuesten Generation) {{{#!html <div style="float: left; margin: 30px;"> }}} {{ http://gallery3.mikrokopter.de/var/albums/intern/sonstiges/1-Funktionen/BL-Ctrl2.png?m=1412606373 || class="feature-icon" }} {{{#!html </div> }}} <<BR>> ''' Motorregler der neuesten Generation ''' <<BR>> Unsere selbst entwickelten BL-Regler können bis zu 1000W pro Motor abgeben. Aktives Bremsen mit Energie-Rückspeisung in den Akku sorgen für spontane Drehzahländerungen und erhöhter Flugzeit. Strom, Temperatur und Betriebszustand jedes Reglers wird an die Fluglageregelung übertragen und im Logfile aufgezeichnet. Die BL-Regler melden z.B. Überlast und Motorstillstand per Telemetrie. Ei n redundanter Datenbus sorgt für zusätzliche Sicherheit. <<BR>><<BR>><<BR>> ---- ######################################### ## Bild Links (ARM9 (32Bit) und AVR RISC-Prozessoren) {{{#!html <div style="float: left; margin: 30px;"> }}} {{ http://gallery3.mikrokopter.de/var/albums/intern/sonstiges/1-Funktionen/IC2.png?m=1412606381 || class="feature-icon" }} {{{#!html </div> }}} <<BR>> ''' ARM9 (32Bit) und AVR RISC-Prozessoren ''' <<BR>> Ca. 12-15 Prozessoren steuern den Kopter (Fluglage, Navigation, Motorregler, GPS, Kamerainterface, Empfänger, usw.) Offene Firmware mit Quellcode in C und offene Schnittstellen erlauben Modifikationen. <<BR>><<BR>><<BR>> ---- ######################################### ## Bild Links (Modernste Sensorik) {{{#!html <div style="float: left; margin: 30px;"> }}} {{ http://gallery3.mikrokopter.de/var/albums/intern/sonstiges/1-Funktionen/Sensor2.png?m=1412606393 || class="feature-icon" }} {{{#!html </div> }}} <<BR>> ''' Modernste Sensorik ''' <<BR>> Im MikroKopter kommen hochpräzise Gyroskope von AnalogDevices zum Einsatz. 4 Beschleunigungs-Sensoren messen Bewegung und Lage. 3D-Magnetfeldsensoren dienen als Kompass für die Navigation. Barometrische Höhenmessung mit ACC-Sensordatenfusion ermöglicht Flüge mit Höhenregelung incl. Auto-Start/Landen auch ohne GPS-Empfang (z.B. Indoor).<<BR>> -> [[https://www.youtube.com/watch?v=7BSUmjhw_5g&list=UUXv7l7VoJSViTQ6skMGmuSg|Demovideo]] <<BR>><<BR>><<BR>> ---- ######################################### ## Bild Links (GPS (Global Positioning System)) {{{#!html <div style="float: left; margin: 30px;"> }}} {{ http://gallery3.mikrokopter.de/var/albums/intern/sonstiges/1-Funktionen/GPS2.png?m=1412606380 || class="feature-icon" }} {{{#!html </div> }}} <<BR>> ''' GPS (Global Positioning System) ''' <<BR>> GPS-System neuester Generation mit hoch empfindlichem GPS Vorverstärker und SAW-Frequenzfilter. Gleichzeitiger Empfang mehrerer GPS-Systeme: <<BR>> * GPS * Glonass * BeiDou Dadurch ist auch GPS-Empfang unter ungünstigen Bedingungen möglich (z.B. Abschattung durch Gebäude und Berge). <<BR>><<BR>><<BR>> ---- ######################################### ## Bild Links (Telemetrie am PC/Tablet) {{{#!html <div style="float: left; margin: 30px;"> }}} {{ http://gallery3.mikrokopter.de/var/albums/intern/sonstiges/1-Funktionen/Telemetrie-PC2.png?m=1412606394 || class="feature-icon" }} {{{#!html </div> }}} <<BR>> ''' Telemetrie am PC/Tablet ''' <<BR>> Wir bieten verschiedene Telemetriesysteme (Up + Downlink) mit bis zu 6km Reichweite an (2,4Ghz, 868Mhz oder 900MhZ). Beobachten Sie Postition und Betriebsdaten (Höhe, Spannung, Flugzeit, Ströme usw.) life am PC oder Tablet und steuern Sie den Kopter mit PC oder Tablet. Bequemer Import von Google-Earth Kartenmaterial für die Navigation. Das Kartenmaterial kann auch Offline benutzt werden. Ebenso kann eigenes Kartenmaterial verwendet werden. <<BR>><<BR>><<BR>> ---- ######################################### ## Bild Links (Telemetrie am Sender mit Up- und Downlink) {{{#!html <div style="float: left; margin: 30px;"> }}} {{ http://gallery3.mikrokopter.de/var/albums/intern/sonstiges/1-Funktionen/Telemetrie-Sender2.png?m=1412606394 || class="feature-icon" }} {{{#!html </div> }}} <<BR>> ''' Telemetrie am Sender mit Up- und Downlink ''' <<BR>> - z.B. Jeti oder Graupner HoTT Sprachansage bei Unterspannung oder Fehlern. Per Knopfdruck können Spannung, Höhe, Entfernung usw. angesagt werden. Eigene Menübedienung im Sender - z.B. Speichern und Abrufen von Wegpunkten. Zusätzliche Logfiles werden im Sender geführt. Im Falle eines Falles lässt sich so z.B. die letzte GPS-Position des Kopters abrufen. <<BR>><<BR>><<BR>> ---- ######################################### ## Bild Links (Flugzeit) {{{#!html <div style="float: left; margin: 30px;"> }}} {{ http://gallery3.mikrokopter.de/var/albums/intern/sonstiges/1-Funktionen/Uhr2.png?m=1412606394 || class="feature-icon" }} {{{#!html </div> }}} <<BR>> ''' Flugzeit ''' <<BR>> Flugzeiten bis zu 40Minuten sind möglich. Mit unseren kostenlosen Tools können sie die Flugzeit unter unterschiedlichen Lastbedingungen berechnen lassen. <<BR>><<BR>><<BR>> ---- ######################################### ## Bild Links (Schüler/Lehrer Systeme) {{{#!html <div style="float: left; margin: 30px;"> }}} {{ http://gallery3.mikrokopter.de/var/albums/intern/sonstiges/1-Funktionen/LS2.png?m=1412606385 || class="feature-icon" }} {{{#!html </div> }}} <<BR>> ''' Schüler/Lehrer Systeme ''' <<BR>> Die Steuerung kann an einen zweiten Sender übergeben werden – optimal zum Flugtraining. Außerdem kann z.B. die Kamerasteuerung über einen zweiten Sender realisiert werden. <<BR>><<BR>><<BR>> ---- ######################################### ## Bild Links (Kamerasteuerung incl. Zoom) {{{#!html <div style="float: left; margin: 30px;"> }}} {{ http://gallery3.mikrokopter.de/var/albums/intern/sonstiges/1-Funktionen/Zoom2.png?m=1412606397 || class="feature-icon" }} {{{#!html </div> }}} <<BR>> ''' Kamerasteuerung incl. Zoom ''' <<BR>> Wir bieten selbst entwickelte digitale Steuerungen von Sony Camcordern an. Damit lassen sich vom Sender aus die wichtigsten Funktionen steuern: * Video Start/Stopp * Photoauslösung * Zoom <<BR>><<BR>><<BR>> ---- ######################################### ## Bild Links (Einfache Bedienung) {{{#!html <div style="float: left; margin: 30px;"> }}} {{ http://gallery3.mikrokopter.de/var/albums/intern/sonstiges/1-Funktionen/Einfach2.png?m=1412606378 || class="feature-icon" }} {{{#!html </div> }}} <<BR>> ''' Einfache Bedienung ''' <<BR>> Einfache und sicher Bedienung dank Funktionen wie: * ComingHome * CareFree * Auto-Start/landen * Failsafe * Einstellbare Flug-Grenzen <<BR>><<BR>><<BR>> ---- ######################################### ## Bild Links (Flug Grenzen) {{{#!html <div style="float: left; margin: 30px;"> }}} {{ http://gallery3.mikrokopter.de/var/albums/intern/sonstiges/1-Funktionen/Grenzen2.png?m=1412606381 || class="feature-icon" }} {{{#!html </div> }}} <<BR>> ''' Flug Grenzen ''' <<BR>> Einstellbare Grenzen wirken wie ein unsichtbarer Käfig. Stellen Sie maximale Höhe und maximale Entfernung ein und der Kopter bleibt am Rand des unsichtbaren Käfigs automatisch stehen. <<BR>><<BR>><<BR>> ---- ######################################### ## Bild Links (Out of the box) {{{#!html <div style="float: left; margin: 30px;"> }}} {{ http://gallery3.mikrokopter.de/var/albums/intern/sonstiges/1-Funktionen/Box2.png?m=1412606374 || class="feature-icon" }} {{{#!html </div> }}} <<BR>> ''' Out of the box ''' <<BR>> Unsere ARF-Systeme sind flugfertig. Wir bieten für Selbstabholer eine Einweisung und Flugtraining an. <<BR>><<BR>><<BR>> ---- ######################################### ## Bild Links (Live Video) {{{#!html <div style="float: left; margin: 30px;"> }}} {{ http://gallery3.mikrokopter.de/var/albums/intern/sonstiges/1-Funktionen/LiveVideo2.png?m=1412606383 || class="feature-icon" }} {{{#!html </div> }}} <<BR>> ''' Live Video ''' <<BR>> Drahtlose Videoübertragung. Sehen Sie am Boden, was die Kamera aufzeichnet.<<BR>> → z.B. auf einem Monitor oder einer Videobrille: [[http://www.mikrokopter.de/de/produkte/videosysteme|Link]] <<BR>><<BR>><<BR>> ---- ######################################### ## Bild Links (Software) {{{#!html <div style="float: left; margin: 30px;"> }}} {{ http://gallery3.mikrokopter.de/var/albums/intern/sonstiges/1-Funktionen/Software2.png?m=1412606393 || class="feature-icon" }} {{{#!html </div> }}} <<BR>> ''' Software ''' <<BR>> Kostenlose Firmware-Updates für unsere Firmware: * PC-Software 'KopterTool' * Android Flugplanung 'MKTT' * Flugsimulator 'AeroSim' * Flugzeitberechnung * Auswertungstools der Logfiles <<BR>><<BR>><<BR>> ---- ######################################### ## Bild Links (OEM und individuelle Flugsysteme) {{{#!html <div style="float: left; margin: 30px;"> }}} {{ http://gallery3.mikrokopter.de/var/albums/intern/sonstiges/1-Funktionen/OEM2.png?m=1412606388 || class="feature-icon" }} {{{#!html </div> }}} <<BR>> ''' OEM und individuelle Flugsysteme ''' <<BR>> Unsere Elektronik kommt in unzähligen MultiKopter-Systemen zum Einsatz. Auch wenn es nicht immer nach MikroKopter aussieht – es könnte sich trotzdem eine MikroKopter-Steuerung unter der Haube verbergen. Die unterschiedlichsten Rahmenkonstruktionen und Propelleranzahl (4-12) sind möglich – Quadro, Hexa, Okto, Deka und Dodeca <<BR>><<BR>><<BR>> ---- ######################################### ## Bild Links (Quellcodes) {{{#!html <div style="float: left; margin: 30px;"> }}} {{ http://gallery3.mikrokopter.de/var/albums/intern/sonstiges/1-Funktionen/Code2.png?m=1412606376 || class="feature-icon" }} {{{#!html </div> }}} <<BR>> ''' Quellcodes ''' <<BR>> Der Quellcode ist offen und eigene Änderungen können umgesetzt, sowie neue Features implementiert werden. Hinweis: Zum Kompilieren des NaviControl-Codes benötigen Sie eine Lib-Link-Lizenz <<BR>><<BR>><<BR>> ---- ######################################### ## Bild Links (Made in Germany - Alles aus einer Hand) {{{#!html <div style="float: left; margin: 30px;"> }}} {{ http://gallery3.mikrokopter.de/var/albums/intern/sonstiges/1-Funktionen/MadeInGermany2.png?m=1412606386 || class="feature-icon" }} {{{#!html </div> }}} <<BR>> ''' Made in Germany - Alles aus einer Hand ''' <<BR>> Wir sind selbst die Entwickler und Hersteller der gesamten Steuerelektronik und Firmware – von der FlightControl bis zum Motorregler. Wir entwickeln seit 15 Jahren Elektronik für die Industrie und sind seit 2006 auf Multikopter spezialisiert. <<BR>> Mehrere tausend (!) MikroKopter fliegen bereits mit unserer Elektronik.<<BR>> -> [[https://www.youtube.com/watch?v=b2tOBbHb0Xc|Infovideo]] <<BR>><<BR>><<BR>> ---- ######################################### ## Bild Links (Keine Panik) {{{#!html <div style="float: left; margin: 30px;"> }}} {{ http://gallery3.mikrokopter.de/var/albums/intern/sonstiges/1-Funktionen/NoPanic2.png?m=1412606387 || class="feature-icon" }} {{{#!html </div> }}} <<BR>> ''' Keine Panik ''' <<BR>> Dank Navigationseinheit und Höhenregler bleibt der Kopter an seiner aktuellen Position stehen sobald sie die Sticks loslassen. Dann einfach GPS-Schalter auf ComingHome schalten und der Kopter fliegt automatisch zurück. <<BR>><<BR>><<BR>> ---- ######################################### ## Bild Links (CareFree 2.0) {{{#!html <div style="float: left; margin: 30px;"> }}} {{ http://gallery3.mikrokopter.de/var/albums/intern/sonstiges/1-Funktionen/CareFree2.png?m=1412606375 || class="feature-icon" }} {{{#!html </div> }}} <<BR>> ''' CareFree 2.0 ''' <<BR>> Für ungeübte Piloten ist es immer das schwierigste, mit der Nase eines Flugmodell auf sich zu zu fliegen, weil dann die Steuerung um 180° verdreht ist. Mit CareFree ist dieses Problem behoben: der Kopter berechnet die Ausrichtung zum Piloten (bzw. Startpunkt) und setzt die Steuerbewegungen entsprechend um. 'Ziehen' am Stick bedeutet dabei immer: 'zurück fliegen'. Das funktioniert auch, wenn sich der Pilot auf der Stelle gedreht hat („Teachable CareFree“). <<BR>><<BR>><<BR>> ---- ######################################### ## Bild Links (Click and Fly (1-Point Navigation) ) {{{#!html <div style="float: left; margin: 30px;"> }}} {{ http://gallery3.mikrokopter.de/var/albums/intern/sonstiges/1-Funktionen/ClickFly2.png?m=1412606375 || class="feature-icon" }} {{{#!html </div> }}} <<BR>> ''' Click and Fly (1-Point Navigation) ''' <<BR>> Mit einem Klick auf die Map können Sie den Kopter an eine gewünschte Zielposition fliegen (Android Tablet oder Laptop). Automatisches Landen an aktueller Position ist ebenfalls jederzeit per Klick möglich. <<BR>><<BR>><<BR>> ---- ######################################### ## Bild Links (Boat Mode) {{{#!html <div style="float: left; margin: 30px;"> }}} {{ http://gallery3.mikrokopter.de/var/albums/intern/sonstiges/1-Funktionen/Boat2.png?m=1412606374 || class="feature-icon" }} {{{#!html </div> }}} <<BR>> ''' Boat Mode ''' <<BR>> m Boat-Mode kann der MikroKopter auch in beweglichen Umgebungen gestartet werden. <<BR>><<BR>><<BR>> ---- ######################################### ## Bild Links (Lizenzierung) {{{#!html <div style="float: left; margin: 30px;"> }}} {{ http://gallery3.mikrokopter.de/var/albums/intern/sonstiges/1-Funktionen/Lizenz2.png?m=1412606384 || class="feature-icon" }} {{{#!html </div> }}} <<BR>> ''' Lizenzierung ''' <<BR>> Sie benötigen größere Reichweite für Wegpunkte-Flüge oder Wegpunkt-Flüge trotz Senderausfall? Kein Problem: eine entsprechende Lizenz können Sie selbst in den Kopter laden. <<BR>><<BR>><<BR>> ---- ######################################### ## Bild Links (Wartungsfreundlich und Modular) {{{#!html <div style="float: left; margin: 30px;"> }}} {{ http://gallery3.mikrokopter.de/var/albums/intern/sonstiges/1-Funktionen/Wartung2.png?m=1412606395 || class="feature-icon" }} {{{#!html </div> }}} <<BR>><<BR>> ''' Wartungsfreundlich und Modular ''' <<BR>> Unser System ist so ausgelegt, dass es leicht repariert und gewartet werden kann. Ist nach einer unsanften Landung oder Baumkontakt ein Motor defekt oder ein Ausleger verbogen, kann der Kopter schnell wieder in Stand gesetzt werden. In der Regel kann der Kunde selbst die wichtigsten Teile wechseln. <<BR>><<BR>><<BR>> ---- ######################################### |
Features of the MikroKopter |

Prolog
MikroKopter are worldwide used and vertical takeoff Aircrafts which aprove their work for loyal service i.e. as a holder for Cameras or sensors.
They are available as a Basicset for Quadro-, Hexa- or OktoKopter]]. Proffesional users can also get an ARF Copter who is ready assembled.
If you will start small? No problem, you can upgrade your copter any time (e.g. from a Quadro to a Okto or with a Set Navigation).
And this easy, cheap and with the existing components.
Flight-Times are, depending on the built and weight, between 15 and 40 minutes. Payloads up to 4kg are possible.
In the magazine RC-Flight-Control you can find some reports about our functions. Here you can find it:
HoTT Telemetry, Autonomous Flying, Point of Interest, FPV, OktoXL
Advantages
The advantages of the MikroKopter in short form:
- Easy-to-assemble
- Individual design of the Kopter is possible
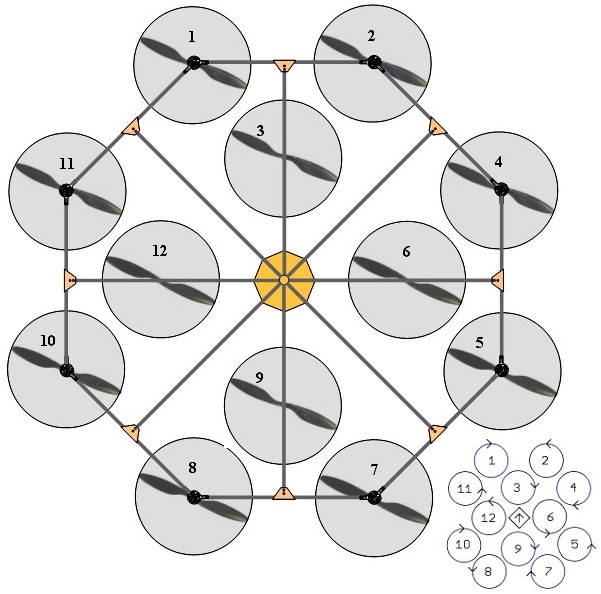
Up to 12 motors can be controlled
- Very easy to fly and reliable
Redundancy (An OktoKopter can be flown safely even one motor failed)
- In "the worst case" very easy to repair
- Our Repair Service and Support helps quickly and easily
Free firmware updates (Download)
- Easily expandable. Existing components can be used
- A basis for alot of applications
- Very high "Fun-Factor" guaranteed
MikroKopter are already used for Aerial photography or professional film productions (example).
Only a few minutes for a perfect aerial picture
Step 1 |
Step 2 |
Step 3 |
Prepare |
Start |
Controlling and monitoring |
|
|
|



Step 4 |
Step 5 |
Optional: Waypoints |
Ready |
|
|


{kind=link}
Functions

GPS-Flugassistenten / Autopilot
One of the key units of the MikroKopter is the GPS-Navigation unit (Navicontrol). This autopilot controls the course and position of the copter. PositionHold, ComingHome and Waypoints provide a safe flight through the air.

PositionHold
Auch bei Wind hält der Kopter präzise seine Position. Konzentrieren Sie sich auf die Kameraperspektive
-> der Kopter bleibt wo er ist (Video).
Mehr Infos sind hier beschrieben: PositionHold

ComingHome
Ein Schalter am Sender lässt den Kopter jederzeit zurück zum Startpunkt fliegen. Auf Wunsch geht er dabei auf eine vordefinierte Höhe.
Mehr Infos sind hier beschrieben: ComingHome

Dynamic Position Hold
Auch im manuellen Flug wird der Kopter trotzdem per GPS geleitet und driftet nicht vom Wind ab - per Sender wird nur Geschwindigkeit und Richtung vorgegeben, die Navigationseinheit hält den Kopter auf Kurs. So lässt sich auch bei Wind die Position präzise verschieben.

Wind und Wetter
Unser Kopter ist durch eine Haube gegen Niederschlag geschützt. Der Einsatz muss auch bei einsetzendem Regen nicht abgebrochen werden.
-> Fliegen auch bei Sturm (Infovideo)

Autostart + Autolanden
Damit kommen auch Anfänger klar: Per Schalter startet der Kopter automatisch und schwebt in ca. 2m Höhe vor Ihnen. Mit dem selben Schalter geht der Kopter auch in den sanften Landeanflug. Hüpfer durch unsichere Piloten gehören damit der Vergangenheit an.
-> Auto-Start und -Landung auch bei Waypoint-Planung per Laptop / Android-Tablet möglich.
-> Infovideo)

Redundanz
Unsere OktoKopter fliegen auch beim Ausfall eines Motors sicher weiter. Die intelligente Fluglageregelung erkennt dies und regelt die verbleibenden Motoren sofort nach. Wir bieten auch die Fluglageregler redundant an – dann bleibt der MK auch bei Ausfall dieser Komponenten unter Kontrolle. -> Zertifizierung durch AustroControl

Waypoint
Waypoint Flüge lassen sich bequem am Laptop/PC oder Android Tablet planen. Gespeicherte Waypoint listen lassen sich im Kopter speichern und per Sender auf dem Flugfeld aufrufen. Die Fluggeschwindigkeit ist programmierbar von 0,1m/sek mit max. 15m/sek -> 54km/h. Die Geschwindigkeit kann im Wegpunkteflug auch per Sender (z.B. Schieberegler) vorgegeben werden (0,1m/sek – 15m/sek). So können Sie auf dem Feld den Flug den Begebenheiten anpassen.
-> Infovideo

Panorama
Einfache Erstellung eines Panoramas per Knopfdruck. Der Kopter dreht sich und neigt die Kamerahalterung. Dadurch entstehen wundervolle Panoramen wie z.B. (Link)

Positionen speichern
Interessante Perspektive gefunden? Wollen Sie genau das selbe Foto von dieser Position im Winter noch einmal schießen? Wegpunkte und interessante Kamerapositionen können während während des Fluges bequem per Sender gespeichert werden. Die Punkte landen auf der SD-Karte im Kopter und können später wieder aufgerufen werden. PC/Tablet sind dafür nicht nötig.
-> [https://www.youtube.com/watch?v=l4VKuqAP-G0|Infovideo]]

Kamerafahrten speichern
Per Sender lassen sich während des Fluges 3D-Wegpunkte programmieren. So kann spontan eine Kamerafahrt geplant werden die wieder und wieder abgefahren wird. Die Geschwindigkeit zwischen den Punkten kann während des Fluges mittels Regler am Senders von sehr langsam (0,1m/s) bis sehr schnell (10m/s) justiert werden. Auch nach einem Akkuwechsel kann die selbe Kamerafahrt wieder aufgerufen werden.

Relative Wegpunkte
Laden sie Wegpunkte relativ und der Kopter fliegt das vorprogrammierte Muster an Ort- und Stelle ab. Das Muster dreht sich sogar mit der Kopter-Ausrichtung beim Start. → auch das geht bequem per Sendermenü und ohne Laptop auf dem Feld. Optimal z.B. für Panoramen oder um Gelände großflächig zu kartografieren

POI (Point of interest)
Programmierbarer Point Of Interest (POI) in 3D -> Die Kamera wird immer auf diesen Punkt gerichtet - sowohl die Richtung, als auch die Höhe. Ideal um Gebäude, Türme im Blick zu halten.

Flexibles Autotrigger
Eine Kamera kann entweder zeitgesteuert, per Wegpunkt oder sogar abstandsgesteuert ausgelöst werden. Alle 15m ein Foto, egal wie schnell man fliegt? Kein Problem! Damit wird das Abfotografieren von großen Flächen zum Kinderspiel. Dieses Feature lässt sich auch mit Waypoint-Flügen kombinieren -> es reicht also, vom Gebiet nur die Eckpunke per Waypoints anzufliegen. Trotzdem werden Fotos mit ausreichender Überlappung gemacht. Dies reduziert die Anzahl von Wegpunkten erheblich. Mit z.B. 16 Wegpunkten erreicht dieses System die selbe effektivität, wofür andere hunderte Punkte bräuchten.

Flugsimulation im Kopter
Eine Flugsimulation ist in der Firmware des MikroKopters integriert. In der Simulation läuft der Flug mit den originalen Routinen im MikroKopter ab. Die virtuelle Position kann am PC beobachtet und per Sender oder Wegpunkten gesteuert werden. Optimal zum Testen von Kamera-Auslösungen bei Wegpunktflügen usw. Selbst Logfiles werden mit den Simulierten Daten erzeugt. Außerdem haben wir einen Flugsimulator, der Flugtraining mit dem originalen Sender erlaubt. (Siehe: Simulation 1, Simulation 2)
{kind=link}
{kind=link}

Logbuch/Flugschreiber
Die Flugdaten werden mit 5Hz auf einer SD-Karte gespeichert.Geloggt werden GPS-Position, Höhe, Geschwindigkeit, Spannung, Schalterstellungen, Fluglage, Einzelströme der Motoren, Temperaturen, Ansagen usw. Die Dateiformate KML und GPX können direkt in Google Earth importiert werden. Detaillierte Auswertemöglichkeiten mittels diverser PC-Tools. Datenlogging mit bis zu 200Hz ist per Telemetrie ebenfalls möglich.

Abfluggewicht und Nutzlast
Auch mit Kamera kann das Gesamtgewicht unter den von der Luftfahrtbehörde geforderten 5kg bleiben. Die Leistungsfähigkeit des Kopters ist erstaunlich. Auch hohe Nutzlasten von bis zu 5kg können transportiert werden.
-> Die ostfriesische Bierdrohne

Automatischer Ausgleich der Kameraneigung
Prinzipbedingt ändert ein Kopter laufend seine Lagewinkel, um zu steuern. Elektronische Kameragimbals gleichen die Bewegung automatisch aus. Kamera-Winkel und Richtung können vom Piloten mittels Schieberegler am Sender selbst verändert werden. Kamerasteuerung per zweiten Sender ist ebenfalls möglich (eine Person fliegt und der andere steuert die Kamera).

FailSafe
Der Kopter fliegt bei Empfangsausfall autonom zurück und landet beim Startpunkt. Bei Unterspannung wird der Pilot per Sprachausgabe und Anzeige gewarnt. Sinkt die Spannung unter eine kritische Grenze, fliegt der Kopter autonom zurück und geht bei Bedarf sogar in den Landeflug.
-> Mehr Infos findet man hier: FailSafe

LiPosafe
Erreicht die Flugbatterie einen voreingestellten Entladepunkt, ertönt automatisch am Kopter und über die Telemetrie ein Warnsignal. Sollte man dies nicht hören, kann der Kopter bei weiteren Warnschwellen automatisch zum Startpunkt zurückfliegen und auch landen.

Moderne Antriebe
Die bürstenlosen Motoren sind nahezu verschleißfrei. Sie bieten hohe Leistungsfähigkeit in kompakter Bauform und lassen sich ausgezeichnet regeln. Wir haben eigene Motoren-Teststände zur Vermessung der Wirkungsgrade von Motor/Propeller-Kombinationen

Motorregler der neuesten Generation
Unsere selbst entwickelten BL-Regler können bis zu 1000W pro Motor abgeben. Aktives Bremsen mit Energie-Rückspeisung in den Akku sorgen für spontane Drehzahländerungen und erhöhter Flugzeit. Strom, Temperatur und Betriebszustand jedes Reglers wird an die Fluglageregelung übertragen und im Logfile aufgezeichnet. Die BL-Regler melden z.B. Überlast und Motorstillstand per Telemetrie. Ei n redundanter Datenbus sorgt für zusätzliche Sicherheit.

ARM9 (32Bit) und AVR RISC-Prozessoren
Ca. 12-15 Prozessoren steuern den Kopter (Fluglage, Navigation, Motorregler, GPS, Kamerainterface, Empfänger, usw.) Offene Firmware mit Quellcode in C und offene Schnittstellen erlauben Modifikationen.

Modernste Sensorik
Im MikroKopter kommen hochpräzise Gyroskope von AnalogDevices zum Einsatz. 4 Beschleunigungs-Sensoren messen Bewegung und Lage. 3D-Magnetfeldsensoren dienen als Kompass für die Navigation. Barometrische Höhenmessung mit ACC-Sensordatenfusion ermöglicht Flüge mit Höhenregelung incl. Auto-Start/Landen auch ohne GPS-Empfang (z.B. Indoor).
-> Demovideo

GPS (Global Positioning System)
GPS-System neuester Generation mit hoch empfindlichem GPS Vorverstärker und SAW-Frequenzfilter. Gleichzeitiger Empfang mehrerer GPS-Systeme:
- GPS
- Glonass
Dadurch ist auch GPS-Empfang unter ungünstigen Bedingungen möglich (z.B. Abschattung durch Gebäude und Berge).

Telemetrie am PC/Tablet
Wir bieten verschiedene Telemetriesysteme (Up + Downlink) mit bis zu 6km Reichweite an (2,4Ghz, 868Mhz oder 900MhZ). Beobachten Sie Postition und Betriebsdaten (Höhe, Spannung, Flugzeit, Ströme usw.) life am PC oder Tablet und steuern Sie den Kopter mit PC oder Tablet. Bequemer Import von Google-Earth Kartenmaterial für die Navigation. Das Kartenmaterial kann auch Offline benutzt werden. Ebenso kann eigenes Kartenmaterial verwendet werden.

Telemetrie am Sender mit Up- und Downlink
- z.B. Jeti oder Graupner HoTT Sprachansage bei Unterspannung oder Fehlern. Per Knopfdruck können Spannung, Höhe, Entfernung usw. angesagt werden. Eigene Menübedienung im Sender - z.B. Speichern und Abrufen von Wegpunkten. Zusätzliche Logfiles werden im Sender geführt. Im Falle eines Falles lässt sich so z.B. die letzte GPS-Position des Kopters abrufen.

Flugzeit
Flugzeiten bis zu 40Minuten sind möglich. Mit unseren kostenlosen Tools können sie die Flugzeit unter unterschiedlichen Lastbedingungen berechnen lassen.

Schüler/Lehrer Systeme
Die Steuerung kann an einen zweiten Sender übergeben werden – optimal zum Flugtraining. Außerdem kann z.B. die Kamerasteuerung über einen zweiten Sender realisiert werden.

Kamerasteuerung incl. Zoom
Wir bieten selbst entwickelte digitale Steuerungen von Sony Camcordern an. Damit lassen sich vom Sender aus die wichtigsten Funktionen steuern:
- Video Start/Stopp
- Photoauslösung
- Zoom

Einfache Bedienung
Einfache und sicher Bedienung dank Funktionen wie:
- Auto-Start/landen
- Failsafe
- Einstellbare Flug-Grenzen

Flug Grenzen
Einstellbare Grenzen wirken wie ein unsichtbarer Käfig. Stellen Sie maximale Höhe und maximale Entfernung ein und der Kopter bleibt am Rand des unsichtbaren Käfigs automatisch stehen.

Out of the box
Unsere ARF-Systeme sind flugfertig. Wir bieten für Selbstabholer eine Einweisung und Flugtraining an.

Live Video
Drahtlose Videoübertragung. Sehen Sie am Boden, was die Kamera aufzeichnet.
→ z.B. auf einem Monitor oder einer Videobrille: Link

Software
Kostenlose Firmware-Updates für unsere Firmware:
PC-Software 'KopterTool'
- Android Flugplanung 'MKTT'
Flugsimulator 'AeroSim'
- Flugzeitberechnung
- Auswertungstools der Logfiles

OEM und individuelle Flugsysteme
Unsere Elektronik kommt in unzähligen MultiKopter-Systemen zum Einsatz. Auch wenn es nicht immer nach MikroKopter aussieht – es könnte sich trotzdem eine MikroKopter-Steuerung unter der Haube verbergen. Die unterschiedlichsten Rahmenkonstruktionen und Propelleranzahl (4-12) sind möglich – Quadro, Hexa, Okto, Deka und Dodeca

Quellcodes
Der Quellcode ist offen und eigene Änderungen können umgesetzt, sowie neue Features implementiert werden. Hinweis: Zum Kompilieren des NaviControl-Codes benötigen Sie eine Lib-Link-Lizenz

Made in Germany - Alles aus einer Hand
Wir sind selbst die Entwickler und Hersteller der gesamten Steuerelektronik und Firmware – von der FlightControl bis zum Motorregler. Wir entwickeln seit 15 Jahren Elektronik für die Industrie und sind seit 2006 auf Multikopter spezialisiert.
Mehrere tausend ![]() MikroKopter fliegen bereits mit unserer Elektronik.
MikroKopter fliegen bereits mit unserer Elektronik.
-> Infovideo

Keine Panik
Dank Navigationseinheit und Höhenregler bleibt der Kopter an seiner aktuellen Position stehen sobald sie die Sticks loslassen. Dann einfach GPS-Schalter auf ComingHome schalten und der Kopter fliegt automatisch zurück.

CareFree 2.0
Für ungeübte Piloten ist es immer das schwierigste, mit der Nase eines Flugmodell auf sich zu zu fliegen, weil dann die Steuerung um 180° verdreht ist. Mit CareFree ist dieses Problem behoben: der Kopter berechnet die Ausrichtung zum Piloten (bzw. Startpunkt) und setzt die Steuerbewegungen entsprechend um. 'Ziehen' am Stick bedeutet dabei immer: 'zurück fliegen'. Das funktioniert auch, wenn sich der Pilot auf der Stelle gedreht hat („Teachable CareFree“).

Click and Fly (1-Point Navigation)
Mit einem Klick auf die Map können Sie den Kopter an eine gewünschte Zielposition fliegen (Android Tablet oder Laptop). Automatisches Landen an aktueller Position ist ebenfalls jederzeit per Klick möglich.

Boat Mode
m Boat-Mode kann der MikroKopter auch in beweglichen Umgebungen gestartet werden.

Lizenzierung
Sie benötigen größere Reichweite für Wegpunkte-Flüge oder Wegpunkt-Flüge trotz Senderausfall? Kein Problem: eine entsprechende Lizenz können Sie selbst in den Kopter laden.

Wartungsfreundlich und Modular
Unser System ist so ausgelegt, dass es leicht repariert und gewartet werden kann. Ist nach einer unsanften Landung oder Baumkontakt ein Motor defekt oder ein Ausleger verbogen, kann der Kopter schnell wieder in Stand gesetzt werden. In der Regel kann der Kunde selbst die wichtigsten Teile wechseln.