|
Größe: 611
Kommentar:
|
Größe: 4605
Kommentar:
|
| Gelöschter Text ist auf diese Art markiert. | Hinzugefügter Text ist auf diese Art markiert. |
| Zeile 7: | Zeile 7: |
| * 16.07.2008: Endlich sind die Platinen gekommen, nun heißt es ran an den Lötkolben *juhu* * 17.07.2008: Die Flight-Ctrl ist fertig gelötet ( bis auf die Sensoren, da fehlt noch das nötige Kleingeld ) * 18.07.2008: BL-Ctrl ist bis auf die MOSFETs fertig * 18.08.2008: Die Motoren sind gekommen * 22.08.2008: Rotoren sind heute eingetroffen, die Ausleger hab ich auch schon gebohrt * 20.09.2008: Gyros sind endlich eingetroffen, das basteln kann weitergehen * 27.09.2008: BL-Ctrl fertig gelötet, langwierige Fehlersuche, da ich die BLs über die RS232 angesteuert hab und mir das "pumpen" nicht erklären konnte, ein Test über die Flight-Ctrl brachte dann die Lösung * 03.10.2008: Flight-Ctrl komplett fertig * 05.10.2008: Gyros waren falsch herum eingelötet,habe es aber noch reparieren können. Gyros wurden dann auch noch abgeglichen. Habe noch eine Bestellung bei Reichelt aufgegeben, es müssen noch ein paar Kleinteile her * 31.01.2009: Nach langer Fehlersuche geht nun auch endlich der letzte Bl. Noch ein paar Kleinigkeiten Löten und es geht in die Lüfte * 05.02.2009: Endlich mal den Empfänger angeschlossen und Quarze gekauft, noch den Akku dran und den I²C-Kommunikation-Fehler beheben und los gehts * 13.02.2009: Jungfernflug * 14.03.2009: Die Platine für das Kompassmodul ist gekommen und wird auch gleich gelötet und vielleicht noch eingebaut. |
|
| Zeile 8: | Zeile 22: |
| leider noch nichts | === Robbe Roxxy2824-34 === ||Zellenzahl Lithium: || 2–3 || ||Laststrom: ||4–8 A || ||Laststrom max. (60 Sek.): ||9 A || ||Leerlaufdrehzahl: || 1100 Umin/V || ||Propellergröße: || 8x5…10x5” || ||Wirkungsgrad: || max. 79 % || ||Wellenleistung: || ca. 90 W || ||Gesamtgewicht (m. Kabel/Adapter): || ca. 48 g || ||Abmessungen: || 28,8 x 26 mm || ||Wellendurchmesser: ||3,17 mm || === Rotoren === ||MP-EPP1045 || 10x4,7" || Schub: 630g || 5800min¯¹ @ 8,9A || ||GWS9x5 || 9x5" || Schub: 540g || 5700min¯¹ @ 9,1A || === FlightCtrl === ||Version ||V.1.2 || ||Software ||V.0.71h || === Brushless Regler === ||Version ||V1.2 || ||Software ||V0.41 || === Empfänger === ||Typ ||WEBRA FSMI || ||Band || 35Mhz A || === Sender === ||Typ ||Grauppner MC14 || ||Erweiterungen || 2 Potis, 1 Schalter || === Gestell === || Rotorabstand || 50 cm || || Gewicht m. Akku || 850 gr || || Gewicht o. Akku || 700 gr || || P-m-Verhältnis || 306 W/kg || || Schub / Gewicht || 2,96 ( 2,59 ) || |
| Zeile 10: | Zeile 55: |
| = Motoren = Vielleicht die 90W mit 10" Rotoren, oder doch 110W? Muss wohl erst den Geldbeutel befragen. |
=== Flug === ||Flugstunden|| 6,5 h || ||Zerstörte Propeller || 8 || ||Zerstörte Ausleger|| 0 || ||Zerstörte Landefüße|| 0 || |
| Zeile 14: | Zeile 62: |
| Die Platinen sind bestellt und die nette Angelika hat auch schon geliefert | Muss ich hier noch machen fügen ein Büldelein. |
| Zeile 17: | Zeile 65: |
| vielleicht Carbon? Oder fürs erste mal Alu, wer weis. | Bestehend aus gefräster CenterPlate ( vielen Dank an den Fräser ;-) ) aus 1,5mm FR4, dazu wurde eine alte Platine gefräst und in ein altes Ätzbad gelegt, bis sich alles Kupfer gelöst hatte. *Bild wurde vom Server gelöscht -> mache neu* und 260*10*7,5mm Aluschienen = Fotos = Leider nur in schlechter Qualität, da mir zZ. keine bessere Kamera zur Verfügung steht. Das ganze ist nur ein Testaufbau, da noch nicht alles so läuft wie es soll. Es sind noch schöne Füße und Beleuchtung vorgesehen, auch die Kabel werden noch besser hingefuddelt. http://www.abload.de/img/pict08964fal.jpg http://www.abload.de/img/pict0897edfo.jpg http://www.abload.de/img/pict0898niyq.jpg http://www.abload.de/img/pict0899xckh.jpg = Jungfernflug = Endlich ist es soweit! Mein Wjerti ist komplett flugfertig! Und er fliegt; seit 01.03.09 17:00 MEZ. Eigentlich war der Erstflug auf 13:00 angesetzt, um diese Uhrzeit war er auch 3mal für etwa 20 Sec. in der Luft bis die Schwerkraft ihn wieder zu Boden riss. Nach ein paar etlichen Flugversuchen eingefleischter MK-Kollegen und diversen Setting-Veränderungen konnten ihn die Profis in der Luft halten. Mein MK ( stolze 850gr mit Akku ! ) reagierte extrem giftig. Nachdem die PID Regler angepasst waren und der inzwischen leere LiPo wieder aufgeladen war durfte ich dann auch mal ran. Ein wunderbares Gefühl, Adrenalin pur! [[ImageLink(http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=29968&g2_serialNumber=1)]] [[ImageLink(http://gallery.mikrokopter.de/main.php?g2_view=core.DownloadItem&g2_itemId=29971&g2_serialNumber=1)]] |
| Zeile 20: | Zeile 92: |
| ---- . KategorieNachbauten |
Akueller Stand
- Mikrokopter bei meinem Kollegen gesehen, sofortige Reaktion: "Habe will"
- 13.07.2008: Platinen und den ATMEGA644P im Shop bestellt
- 14.07.2008: Die Bauteile für die Flight-Ctrl und die BL-Ctrls sind gekommen
- 16.07.2008: Endlich sind die Platinen gekommen, nun heißt es ran an den Lötkolben *juhu*
- 17.07.2008: Die Flight-Ctrl ist fertig gelötet ( bis auf die Sensoren, da fehlt noch das nötige Kleingeld )
- 18.07.2008: BL-Ctrl ist bis auf die MOSFETs fertig
- 18.08.2008: Die Motoren sind gekommen
- 22.08.2008: Rotoren sind heute eingetroffen, die Ausleger hab ich auch schon gebohrt
- 20.09.2008: Gyros sind endlich eingetroffen, das basteln kann weitergehen
- 27.09.2008: BL-Ctrl fertig gelötet, langwierige Fehlersuche, da ich die BLs über die RS232 angesteuert hab und mir das "pumpen" nicht erklären konnte, ein Test über die Flight-Ctrl brachte dann die Lösung
- 03.10.2008: Flight-Ctrl komplett fertig
- 05.10.2008: Gyros waren falsch herum eingelötet,habe es aber noch reparieren können. Gyros wurden dann auch noch abgeglichen. Habe noch eine Bestellung bei Reichelt aufgegeben, es müssen noch ein paar Kleinteile her
- 31.01.2009: Nach langer Fehlersuche geht nun auch endlich der letzte Bl. Noch ein paar Kleinigkeiten Löten und es geht in die Lüfte
- 05.02.2009: Endlich mal den Empfänger angeschlossen und Quarze gekauft, noch den Akku dran und den I²C-Kommunikation-Fehler beheben und los gehts
- 13.02.2009: Jungfernflug
- 14.03.2009: Die Platine für das Kompassmodul ist gekommen und wird auch gleich gelötet und vielleicht noch eingebaut.
Technische Daten
Robbe Roxxy2824-34
Zellenzahl Lithium: |
2–3 |
Laststrom: |
4–8 A |
Laststrom max. (60 Sek.): |
9 A |
Leerlaufdrehzahl: |
1100 Umin/V |
Propellergröße: |
8x5…10x5” |
Wirkungsgrad: |
max. 79 % |
Wellenleistung: |
ca. 90 W |
Gesamtgewicht (m. Kabel/Adapter): |
ca. 48 g |
Abmessungen: |
28,8 x 26 mm |
Wellendurchmesser: |
3,17 mm |
Rotoren
MP-EPP1045 |
10x4,7" |
Schub: 630g |
5800min¯¹ @ 8,9A |
GWS9x5 |
9x5" |
Schub: 540g |
5700min¯¹ @ 9,1A |
FlightCtrl
Version |
V.1.2 |
Software |
V.0.71h |
Brushless Regler
Version |
V1.2 |
Software |
V0.41 |
Empfänger
Typ |
WEBRA FSMI |
Band |
35Mhz A |
Sender
Typ |
Grauppner MC14 |
Erweiterungen |
2 Potis, 1 Schalter |
Gestell
Rotorabstand |
50 cm |
Gewicht m. Akku |
850 gr |
Gewicht o. Akku |
700 gr |
P-m-Verhältnis |
306 W/kg |
Schub / Gewicht |
2,96 ( 2,59 ) |
Flug
Flugstunden |
6,5 h |
Zerstörte Propeller |
8 |
Zerstörte Ausleger |
0 |
Zerstörte Landefüße |
0 |
Elektronik
Muss ich hier noch machen fügen ein Büldelein.
Rahmen
Bestehend aus gefräster CenterPlate ( vielen Dank an den Fräser ![]() ) aus 1,5mm FR4, dazu wurde eine alte Platine gefräst und in ein altes Ätzbad gelegt, bis sich alles Kupfer gelöst hatte.
) aus 1,5mm FR4, dazu wurde eine alte Platine gefräst und in ein altes Ätzbad gelegt, bis sich alles Kupfer gelöst hatte.
*Bild wurde vom Server gelöscht -> mache neu*
und 260*10*7,5mm Aluschienen
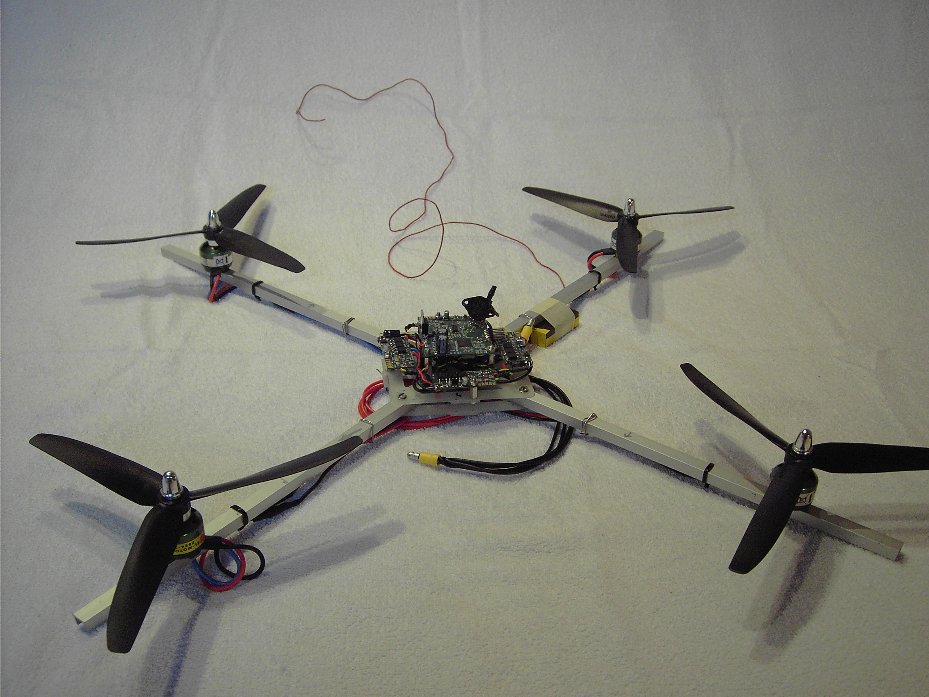
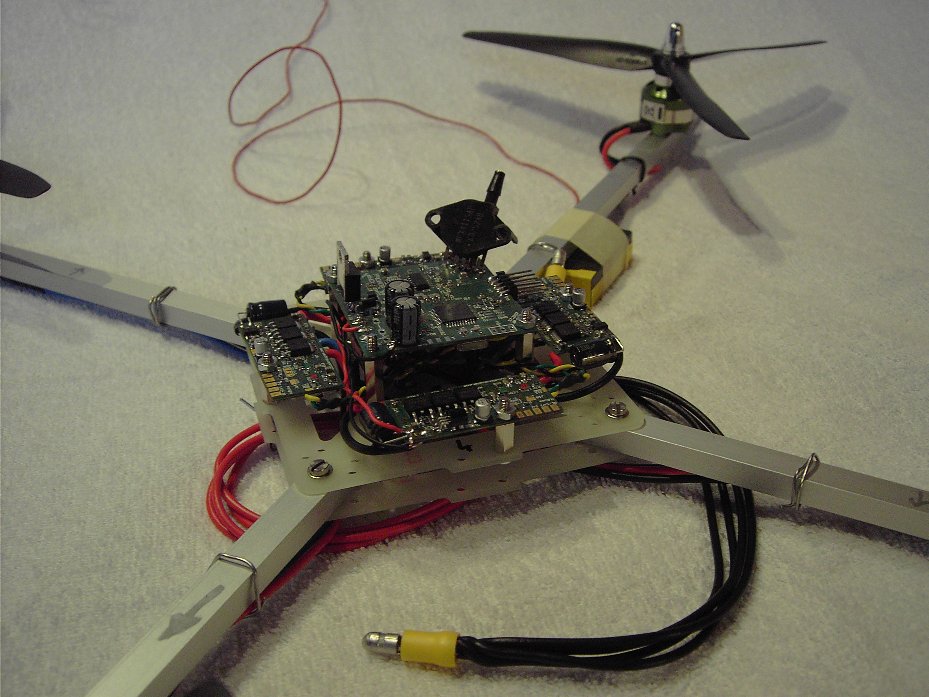
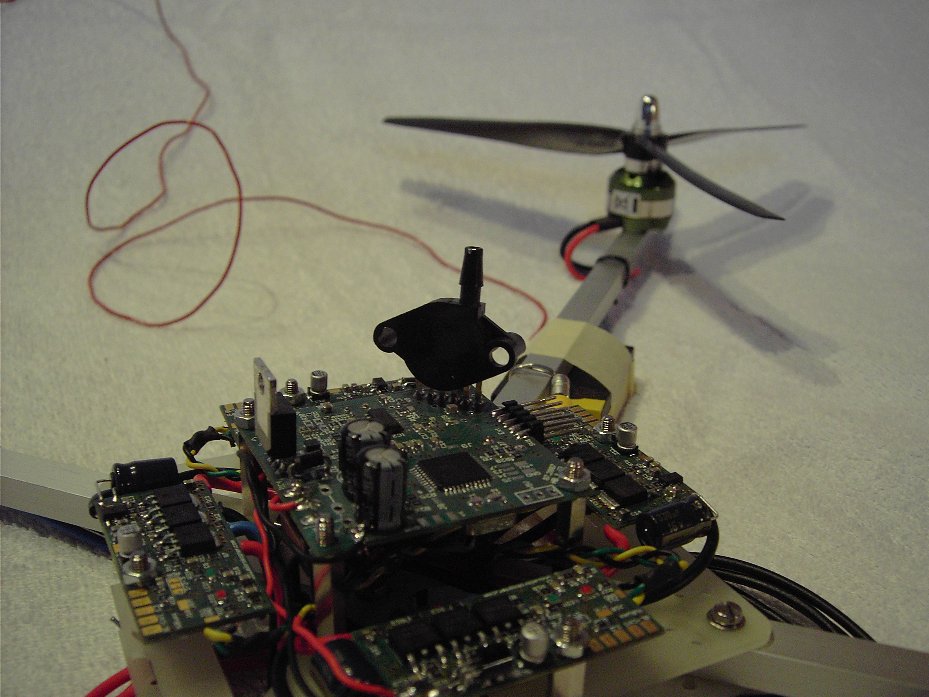
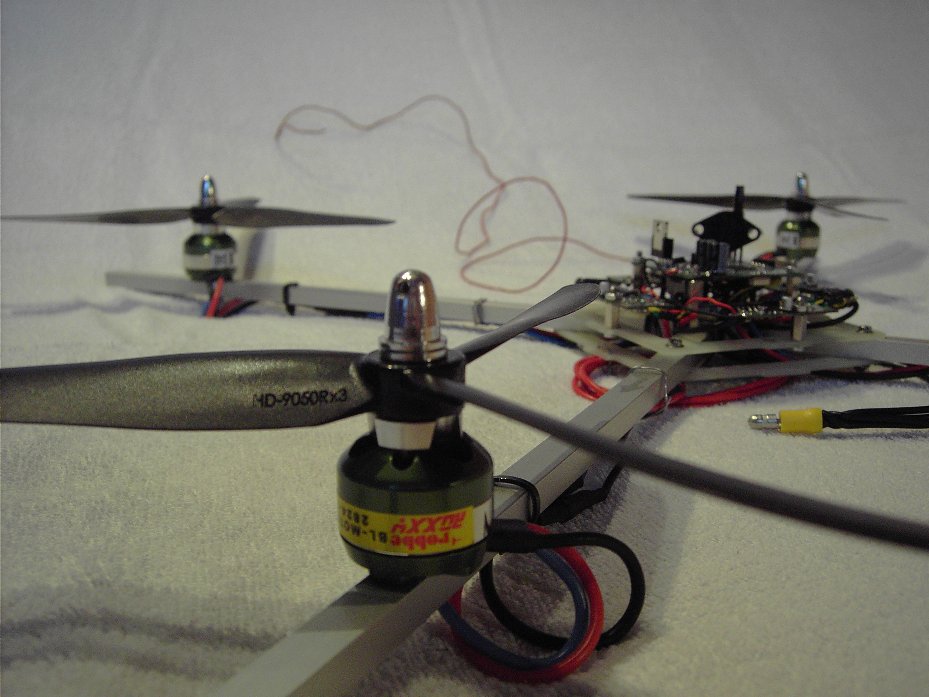
Fotos
Leider nur in schlechter Qualität, da mir zZ. keine bessere Kamera zur Verfügung steht.
Das ganze ist nur ein Testaufbau, da noch nicht alles so läuft wie es soll. Es sind noch schöne Füße und Beleuchtung vorgesehen, auch die Kabel werden noch besser hingefuddelt.
http://www.abload.de/img/pict08964fal.jpg
{kind=link}
http://www.abload.de/img/pict0897edfo.jpg
{kind=link}
http://www.abload.de/img/pict0898niyq.jpg
{kind=link}
http://www.abload.de/img/pict0899xckh.jpg
{kind=link}
Jungfernflug
Endlich ist es soweit! Mein Wjerti ist komplett flugfertig! Und er fliegt; seit 01.03.09 17:00 MEZ. Eigentlich war der Erstflug auf 13:00 angesetzt, um diese Uhrzeit war er auch 3mal für etwa 20 Sec. in der Luft bis die Schwerkraft ihn wieder zu Boden riss. Nach ein paar etlichen Flugversuchen eingefleischter MK-Kollegen und diversen Setting-Veränderungen konnten ihn die Profis in der Luft halten. Mein MK ( stolze 850gr mit Akku ! ) reagierte extrem giftig. Nachdem die PID Regler angepasst waren und der inzwischen leere LiPo wieder aufgeladen war durfte ich dann auch mal ran. Ein wunderbares Gefühl, Adrenalin pur!