|
Größe: 1891
Kommentar:
|
Größe: 3829
Kommentar:
|
| Gelöschter Text ist auf diese Art markiert. | Hinzugefügter Text ist auf diese Art markiert. |
| Zeile 1: | Zeile 1: |
| [[BR]] deutsche Übersetzung des englischen Manuals ["en/TowerPro25A2Regler"] Original von ArthurP |
[[BR]] deutsche Übersetzung des englischen Manuals ["en/TowerPro25A2Regler"] von ArthurP |
| Zeile 11: | Zeile 9: |
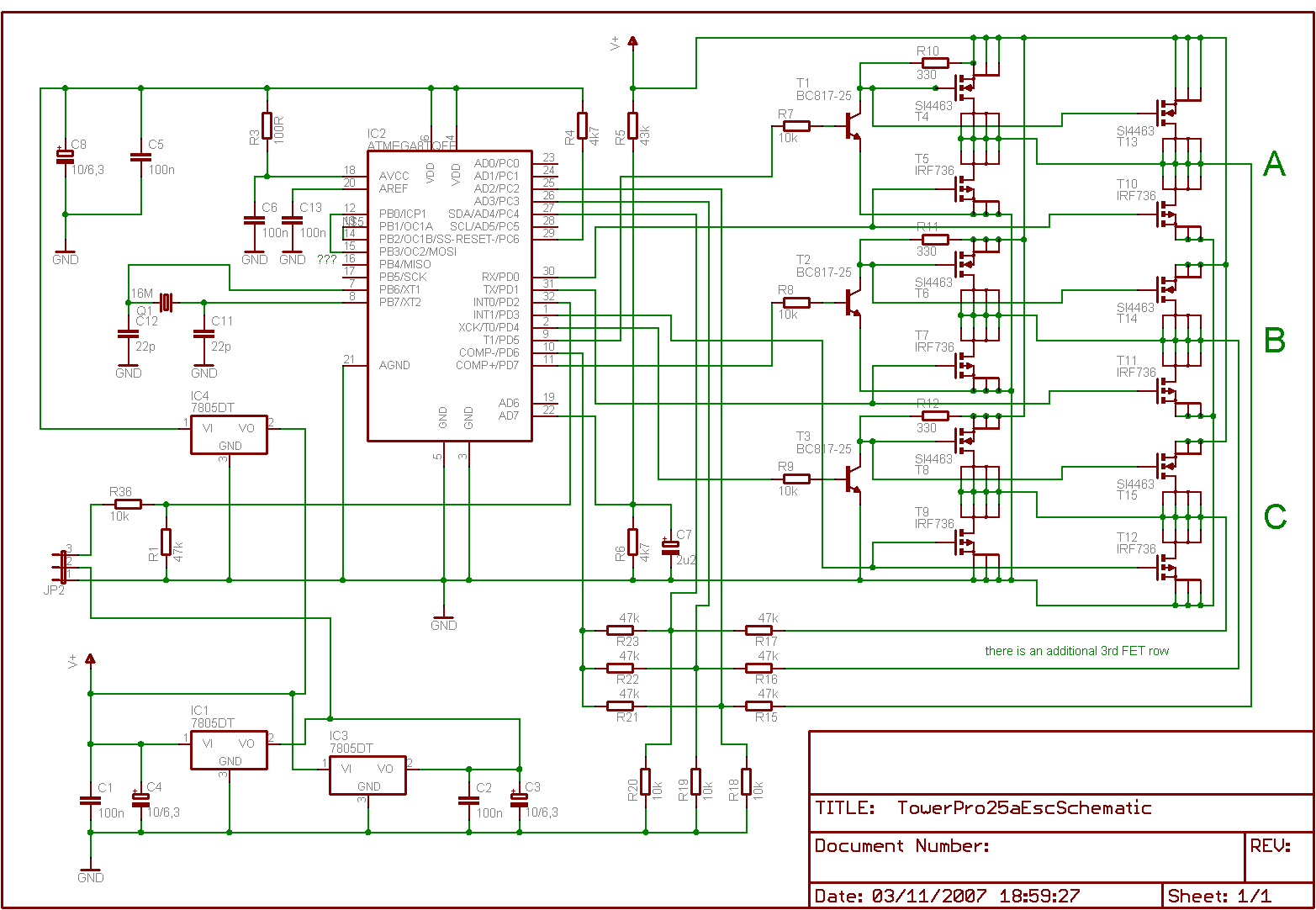
| http://www.mikrokopter.de/ucwiki/en/TowerPro25A2Regler?action=AttachFile&do=get&target=TowerPro25aEscSchematic.png | Multirotorplattformen wie der [http://www.mikrokopter.de Mikrokopter], der [http://www.tt-tronix.de/ BigQuadro] oder [http://www.uavp.de/ UAVP] benötigen zur Lageregelung eine hohe Aktualisierungsrate der Motordrehzahl. Die meisten komerziellen Motorregler http://www.mikrokopter.de/ucwiki/en/TowerPro25A2Regler?action=AttachFile&do=get&target=TowerPro25aEscSchematic.png |
| Zeile 13: | Zeile 11: |
| . | |
| Zeile 33: | Zeile 32: |
| http://www.mikrokopter.de/ucwiki/MikroKopter?action=AttachFile&do=get&target=f071101090556_0800.JPG bitte häufiges hin- und herbiegen der Spannungsreglerplatine vermeiden. Dadurch könnten die drei Verbindugen zur Hauptplatine unterbrochen werden. |
|
| Zeile 35: | Zeile 38: |
| bitte häufiges hin- und herbiegen der Spannungsreglerplatine vermeiden. Dadurch könnten die drei Verbindugen zur Hauptplatine unterbrochen werden. | Für den TWI / I2C-Anschluss benötigen wir die Anschlüsse SDA (Pin27) und SCL (Pin28) sowie einen Masseanschluss (GND). Viele Pins des Kontrollers sind doppelt belegt sind. Der Pin 27 kann wahlweise als SDA-Anschluss als auch als ein Pin des integrierten AD-Wandlers genutzt werden. Leider wird der Pin27 auf unserer Reglerplatine als AD-Wandlereingang benutzt. Daher ist es erfoderlich diesen zum einem anderen freien AD-Wandlereingang umzulegen. Da die Software für die Regler sowieso angepasst bzw. neu geschrieben werden mußte, ist diese Änderung berücksichtigt worden. http://www.mikrokopter.de/ucwiki/MikroKopter?action=AttachFile&do=get&target=f071102183152_0800WorkIdentified.JPG Für die Neuprogrammierung des Mikrokontrollers ist es erforderlich, das ISP-Interface herauszuführen. Es besteht aus den Anschlußleitungen MISO, MOSI, SCK, RST, 5V and GND. Die Resetleitung (RST) greifen wir nicht direkt am Kontrollerab, sondern am Ende einer Leiterbahn, die zu einem Widerstand führt. So kann verhindert werden, daß an drei direkt nebeneinander liegenden Kontrollerpins Drähte angelötet werden müssen. Der schwierigste Teil des Umbaus ist die Freischaltung und Verlegung des AD-Wandlereigangs ADC4 (Pin27) nach ADC1 (Pin24). Wegen der Doppelbelegung vieler Pins ist der http://www.mikrokopter.de/ucwiki/MikroKopter?action=AttachFile&do=get&target=f071102183648cut_0800.jpg == Test des umgebauten Motorreglers (z.B. mit dem MikrokopterTool) == == Umbau abschliessen == == Schlußwort == http://img48.imageshack.us/img48/3545/quaxreglercp4.jpg |
BR deutsche Übersetzung des englischen Manuals ["en/TowerPro25A2Regler"] von ArthurP
![]() ToDo: hier gibt es noch etwas zu tun
ToDo: hier gibt es noch etwas zu tun
Umbau von TowerPro25A-Typ2-Reglern auf TWI/I2C-Ansteuerung
Übersicht
Multirotorplattformen wie der [http://www.mikrokopter.de Mikrokopter], der [http://www.tt-tronix.de/ BigQuadro] oder [http://www.uavp.de/ UAVP] benötigen zur Lageregelung eine hohe Aktualisierungsrate der Motordrehzahl. Die meisten komerziellen Motorregler http://www.mikrokopter.de/ucwiki/en/TowerPro25A2Regler?action=AttachFile&do=get&target=TowerPro25aEscSchematic.png
{kind=link}
Übersicht über die verschiedenen Typen von elektronische Geschwindigkeitsreglern (ESCs), Umbauanleitungen und Firmwarefiles
Diese Umnauanleitung bezieht sich auf die derzeitigen Ausführungen vom Typ2 der ESCs
Erforderliche Ausrüstung für die Umrüstung
Wie lötet man Drähte an SMD-Bauteile und den AVR-Controller
Umbau der aktuellen Version des TowerPro25A auf I2C-Ansteuerung
Als erstes muß der Schrumpfschlauch entfernt werden. Dazu schneidet man längs der schmalen Seite oder auf der Seite mit dem Kühlkörper den Schrumpfschlauch auf (siehe übernächstes Foto).
http://www.mikrokopter.de/ucwiki/MikroKopter?action=AttachFile&do=get&target=f071101090334_0800.JPG
{kind=link}
aktuell befindet sich der Aufkleber auf dem Schrumpfschlauch auf der Seite mit dem Kühlkörper.
http://www.mikrokopter.de/ucwiki/MikroKopter?action=AttachFile&do=get&target=f071101090520_0800.JPG
{kind=link}
nach Entfernen des Schrupfschlauches ist die Oberseite des Reglers erkennbar. Dieser Typ2 besitzt eine zweite Platine, auf der sich vier Spannungsregler befinden.
http://www.mikrokopter.de/ucwiki/MikroKopter?action=AttachFile&do=get&target=f071101090556_0800.JPG
{kind=link}
nun klappt man die Spaunnungsreglerplatine vorsichtig zur Seite
http://www.mikrokopter.de/ucwiki/MikroKopter?action=AttachFile&do=get&target=f071101090556_0800.JPG
bitte häufiges hin- und herbiegen der Spannungsreglerplatine vermeiden. Dadurch könnten die drei Verbindugen zur Hauptplatine unterbrochen werden.
http://www.mikrokopter.de/ucwiki/MikroKopter?action=AttachFile&do=get&target=f071101090616_0800.JPG
{kind=link}
Für den TWI / I2C-Anschluss benötigen wir die Anschlüsse SDA (Pin27) und SCL (Pin28) sowie einen Masseanschluss (GND). Viele Pins des Kontrollers sind doppelt belegt sind. Der Pin 27 kann wahlweise als SDA-Anschluss als auch als ein Pin des integrierten AD-Wandlers genutzt werden. Leider wird der Pin27 auf unserer Reglerplatine als AD-Wandlereingang benutzt. Daher ist es erfoderlich diesen zum einem anderen freien AD-Wandlereingang umzulegen. Da die Software für die Regler sowieso angepasst bzw. neu geschrieben werden mußte, ist diese Änderung berücksichtigt worden. http://www.mikrokopter.de/ucwiki/MikroKopter?action=AttachFile&do=get&target=f071102183152_0800WorkIdentified.JPG
{kind=link}
Für die Neuprogrammierung des Mikrokontrollers ist es erforderlich, das ISP-Interface herauszuführen. Es besteht aus den Anschlußleitungen MISO, MOSI, SCK, RST, 5V and GND. Die Resetleitung (RST) greifen wir nicht direkt am Kontrollerab, sondern am Ende einer Leiterbahn, die zu einem Widerstand führt. So kann verhindert werden, daß an drei direkt nebeneinander liegenden Kontrollerpins Drähte angelötet werden müssen.
Der schwierigste Teil des Umbaus ist die Freischaltung und Verlegung des AD-Wandlereigangs ADC4 (Pin27) nach ADC1 (Pin24). Wegen der Doppelbelegung vieler Pins ist der
{kind=link}
Test des umgebauten Motorreglers (z.B. mit dem MikrokopterTool)
Umbau abschliessen
{kind=link}