|
Größe: 1891
Kommentar:
|
Größe: 2319
Kommentar:
|
| Gelöschter Text ist auf diese Art markiert. | Hinzugefügter Text ist auf diese Art markiert. |
| Zeile 1: | Zeile 1: |
| [[BR]] deutsche Übersetzung des englischen Manuals ["en/TowerPro25A2Regler"] Original von ArthurP |
[[BR]] deutsche Übersetzung des englischen Manuals ["en/TowerPro25A2Regler"] von ArthurP |
| Zeile 11: | Zeile 9: |
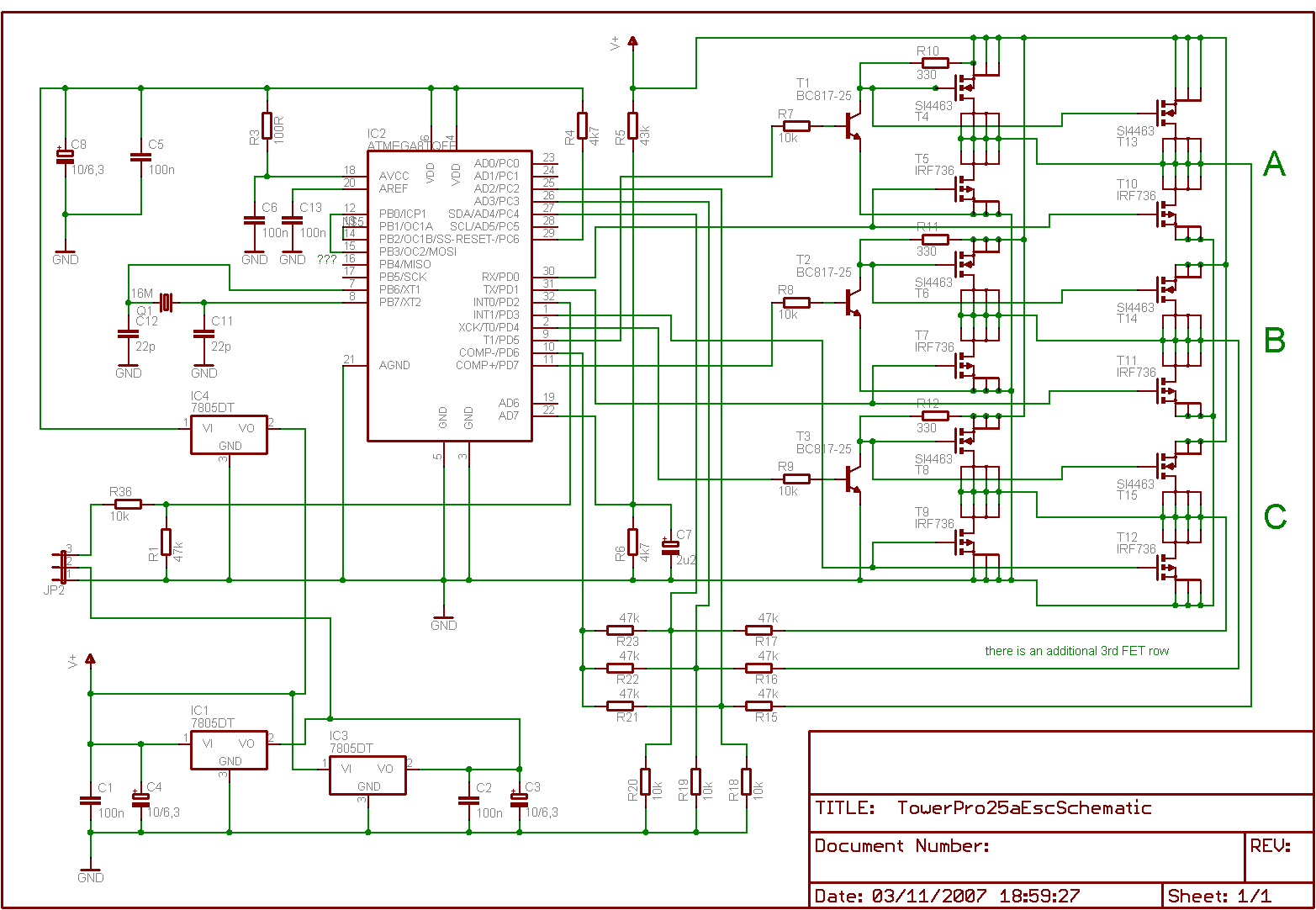
| http://www.mikrokopter.de/ucwiki/en/TowerPro25A2Regler?action=AttachFile&do=get&target=TowerPro25aEscSchematic.png | Multirotorplattformen wie der [http://www.mikrokopter.de Mikrokopter], der [http://www.tt-tronix.de/ BigQuadro] oder [http://www.uavp.de/ UAVP] benötigen zur Lageregelung eine hohe Aktualisierungsrate der Motordrehzahl. Die meisten komerziellen Motorregler http://www.mikrokopter.de/ucwiki/en/TowerPro25A2Regler?action=AttachFile&do=get&target=TowerPro25aEscSchematic.png |
| Zeile 13: | Zeile 11: |
| . | |
| Zeile 36: | Zeile 35: |
== Test des umgebauten Motorreglers (z.B. mit dem MikrokopterTool) == == Umbau abschliessen == == Schlußwort == http://img48.imageshack.us/img48/3545/quaxreglercp4.jpg |
BR deutsche Übersetzung des englischen Manuals ["en/TowerPro25A2Regler"] von ArthurP
![]() ToDo: hier gibt es noch etwas zu tun
ToDo: hier gibt es noch etwas zu tun
Umbau von TowerPro25A-Typ2-Reglern auf TWI/I2C-Ansteuerung
Übersicht
Multirotorplattformen wie der [http://www.mikrokopter.de Mikrokopter], der [http://www.tt-tronix.de/ BigQuadro] oder [http://www.uavp.de/ UAVP] benötigen zur Lageregelung eine hohe Aktualisierungsrate der Motordrehzahl. Die meisten komerziellen Motorregler http://www.mikrokopter.de/ucwiki/en/TowerPro25A2Regler?action=AttachFile&do=get&target=TowerPro25aEscSchematic.png
{kind=link}
Übersicht über die verschiedenen Typen von elektronische Geschwindigkeitsreglern (ESCs), Umbauanleitungen und Firmwarefiles
Diese Umnauanleitung bezieht sich auf die derzeitigen Ausführungen vom Typ2 der ESCs
Erforderliche Ausrüstung für die Umrüstung
Wie lötet man Drähte an SMD-Bauteile und den AVR-Controller
Umbau der aktuellen Version des TowerPro25A auf I2C-Ansteuerung
Als erstes muß der Schrumpfschlauch entfernt werden. Dazu schneidet man längs der schmalen Seite oder auf der Seite mit dem Kühlkörper den Schrumpfschlauch auf (siehe übernächstes Foto).
http://www.mikrokopter.de/ucwiki/MikroKopter?action=AttachFile&do=get&target=f071101090334_0800.JPG
{kind=link}
aktuell befindet sich der Aufkleber auf dem Schrumpfschlauch auf der Seite mit dem Kühlkörper.
http://www.mikrokopter.de/ucwiki/MikroKopter?action=AttachFile&do=get&target=f071101090520_0800.JPG
{kind=link}
nach Entfernen des Schrupfschlauches ist die Oberseite des Reglers erkennbar. Dieser Typ2 besitzt eine zweite Platine, auf der sich vier Spannungsregler befinden.
http://www.mikrokopter.de/ucwiki/MikroKopter?action=AttachFile&do=get&target=f071101090556_0800.JPG
{kind=link}
nun klappt man die Spaunnungsreglerplatine vorsichtig zur Seite
http://www.mikrokopter.de/ucwiki/MikroKopter?action=AttachFile&do=get&target=f071101090616_0800.JPG
{kind=link}
bitte häufiges hin- und herbiegen der Spannungsreglerplatine vermeiden. Dadurch könnten die drei Verbindugen zur Hauptplatine unterbrochen werden.
Test des umgebauten Motorreglers (z.B. mit dem MikrokopterTool)
Umbau abschliessen
{kind=link}